

Robot laser welding and grinding device
A technology of laser welding and robots, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as broken workpieces, damage, rough and uneven product surfaces, etc., to avoid collisions and ensure product quality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to deepen the understanding of the present invention, the present invention will be further described below in conjunction with examples, which are only used to explain the present invention and do not constitute a limitation to the protection scope of the present invention.
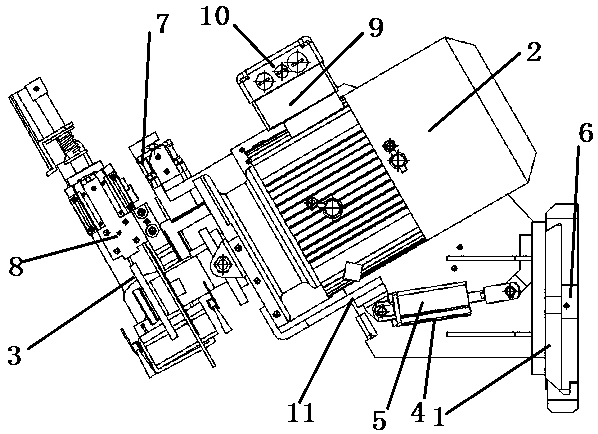
[0021] Such as figure 1 As shown, this embodiment provides a robot laser welding and grinding device, which includes a grinding execution part, a power adjustment part and a fixed support base 1, the power adjustment part is arranged on the fixed support base 1, and the grinding execution part is set At the front end of the power adjustment part, the grinding execution part includes a motor 2 and a grinding wheel sheet 3. The grinding wheel sheet 3 is installed at the front end of the motor 2. The power adjustment part includes a cylinder 4 and a solenoid valve 5. The motor 2 is arranged on the cylinder 4, the other end of the cylinder 4 is connected to the fixed support base 1, and the e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More