

Trajectory tracking control method used for driverless vehicle
An unmanned vehicle, trajectory tracking technology, applied in the direction of control devices, vehicle components, other vehicle parameters, etc., can solve problems such as vehicle instability, affecting vehicle safety, and lateral tire force saturation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments, wherein the specific embodiments and descriptions are only used to explain the present invention, but are not intended to limit the present invention.
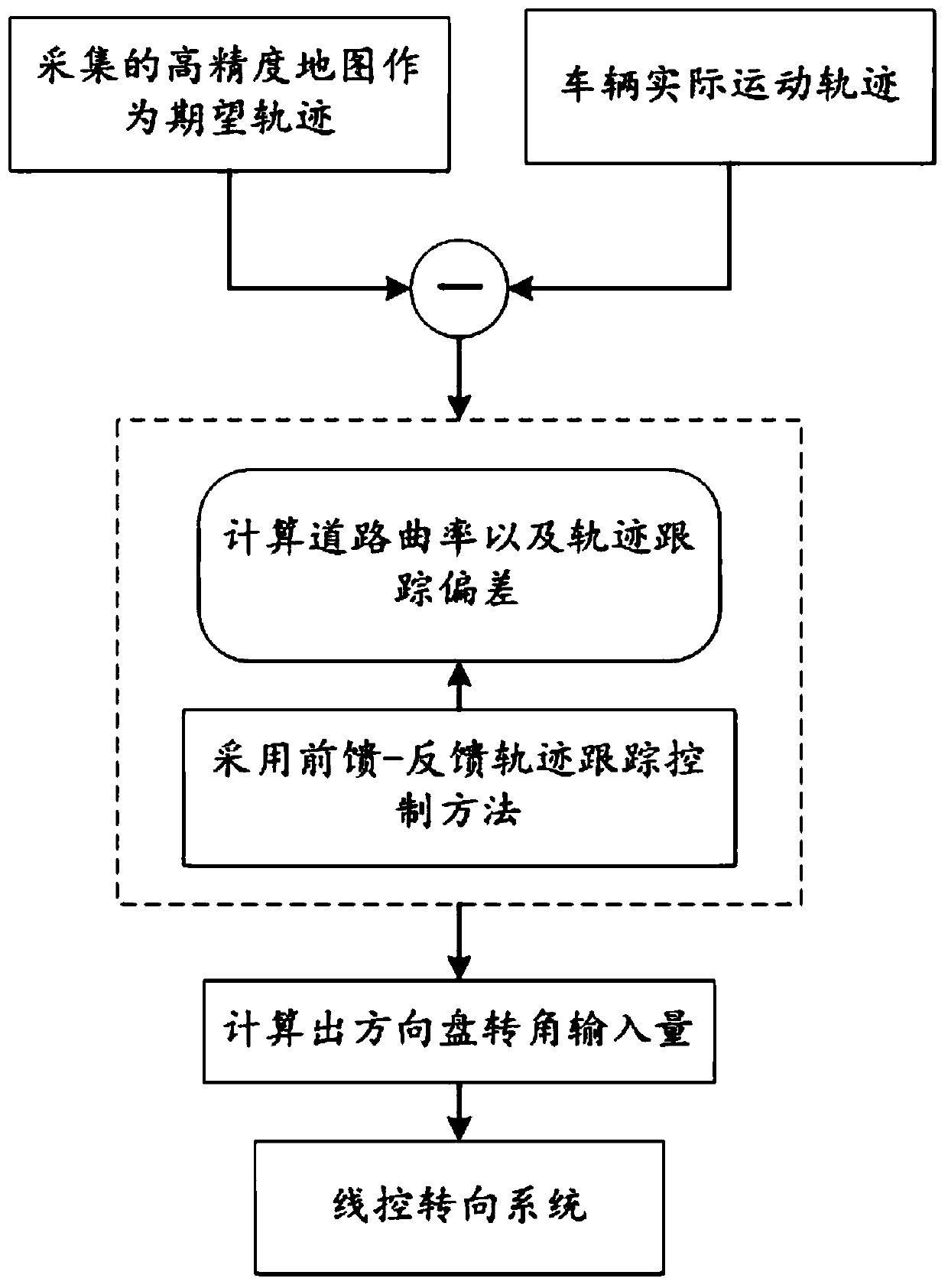
[0066] Such as figure 1 As shown, the present invention discloses a trajectory tracking control method for unmanned vehicles, comprising the following steps:
[0067] Step 1: collect a piece of high-precision map information as a reference track according to the GPS / INS system, and determine the current position of the vehicle body according to the vehicle sensor when the vehicle is tracking on this reference track;
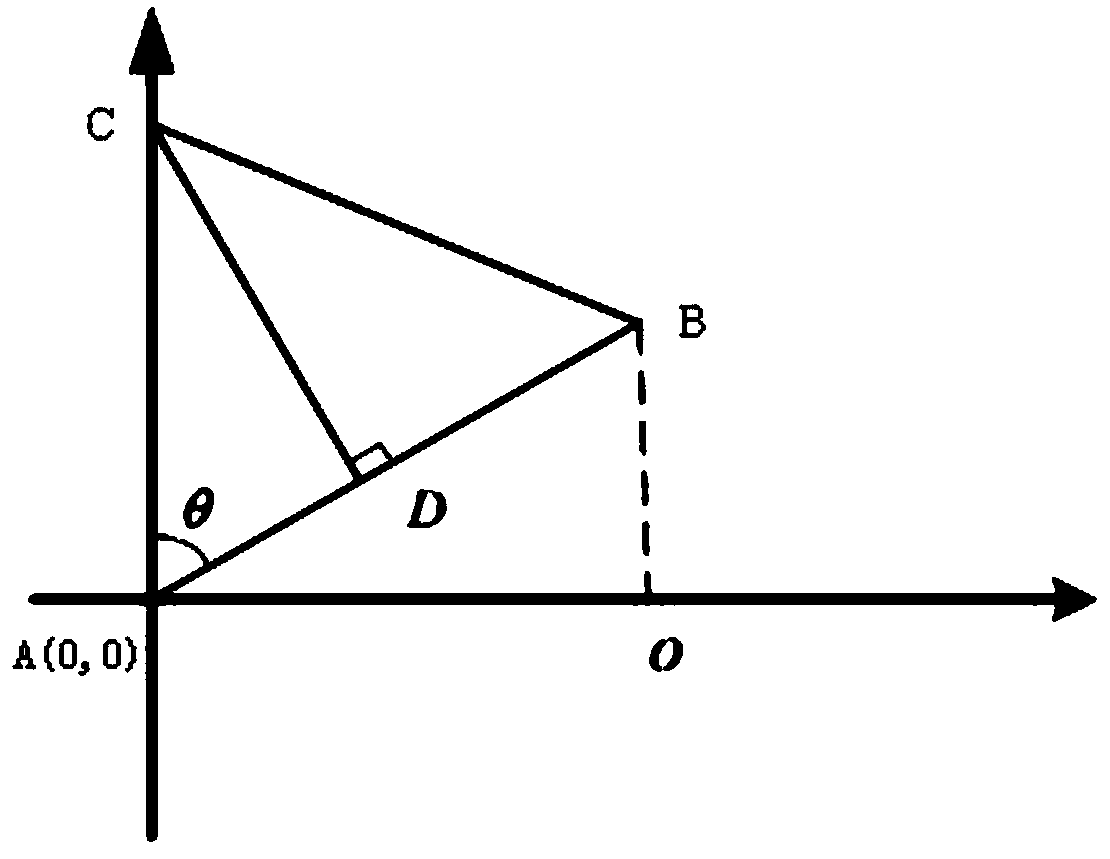
[0068] Step 2: During the tracking movement of the vehicle, search for the closest matching point from the current position of the vehicle according to the reference trajectory collected in Step 1, select a forward point at a certain distance from the nearest matching point, and u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More