

Multi-joint bionic diploe with autonomous hydraulic distribution power
A hydraulic power system and multi-joint technology, applied in the field of intelligent bionic robots, can solve the problems of inability to realize multi-angle motion, low charging efficiency, inconvenient disassembly and assembly, etc., and achieve rapid disassembly and replacement, simple structure, and improved work reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
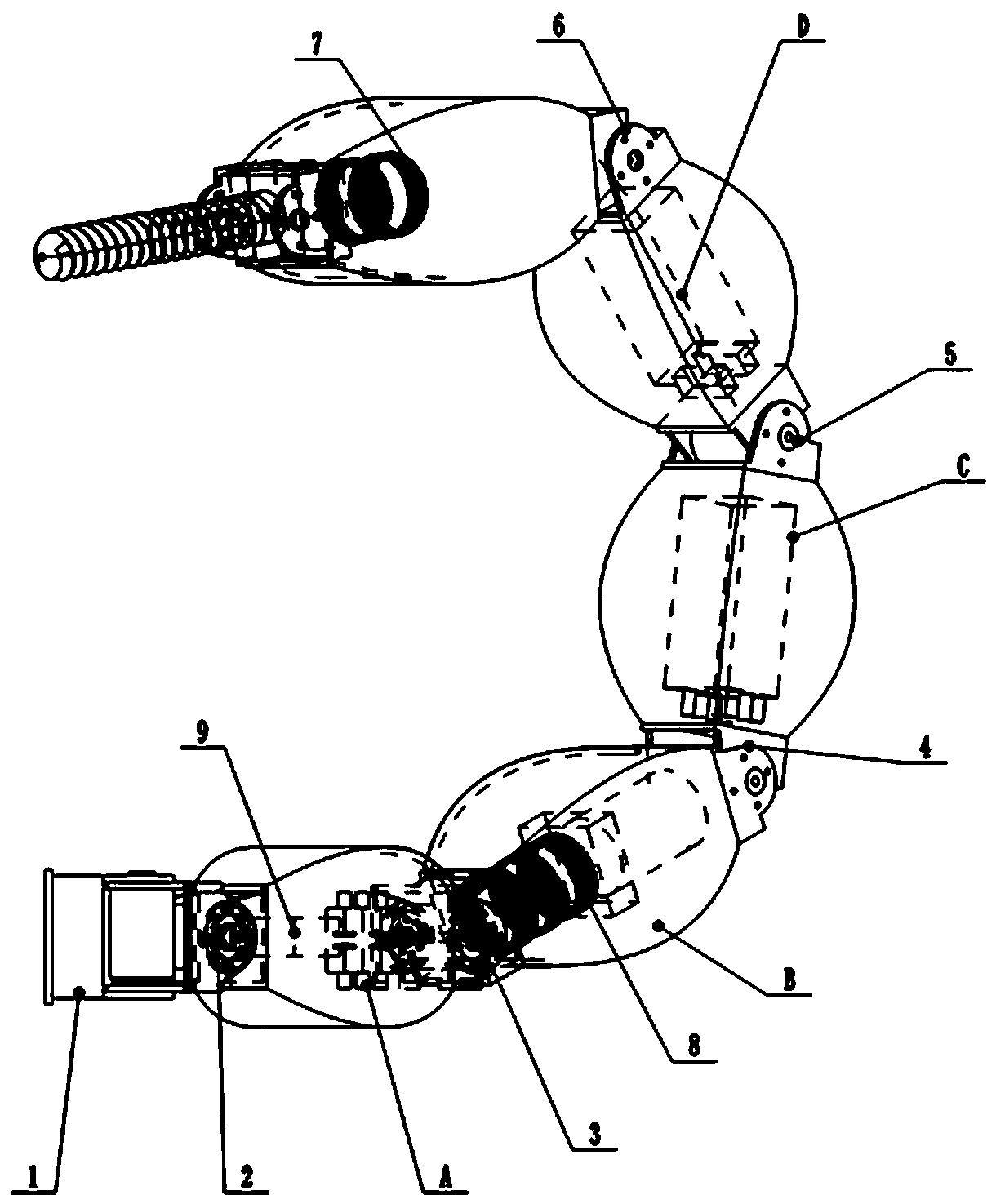
[0036] refer to figure 1 , figure 2 , the multi-joint bionic scorpion tail with autonomous hydraulic distribution power in this embodiment includes a connecting frame 1, a three-dimensional joint 2, a tail section A, a two-dimensional joint I3, a tail section B, a two-dimensional joint II4, a tail section C, and a two-dimensional joint III5, tail section D, two-dimensional joint IV6, tail spur device 7, hydraulic power system 8 and electronic control device 9; three-dimensional joint 2 is fixed on the connecting frame 1 and connected with tail section A, tail section A, tail section B, The tail section C, the tail section D and the tail thorn device 7 are sequentially connected through the two-dimensional joint I3, the two-dimensional joint II4, the two-dimensional joint III5, and the two-dimensional joint IV6, and the hydraulic power system 5 is fixed on the tail section A, the tail section B, and the two-dimensional joint. The cavities of tail section C and tail section D ...
Embodiment 2
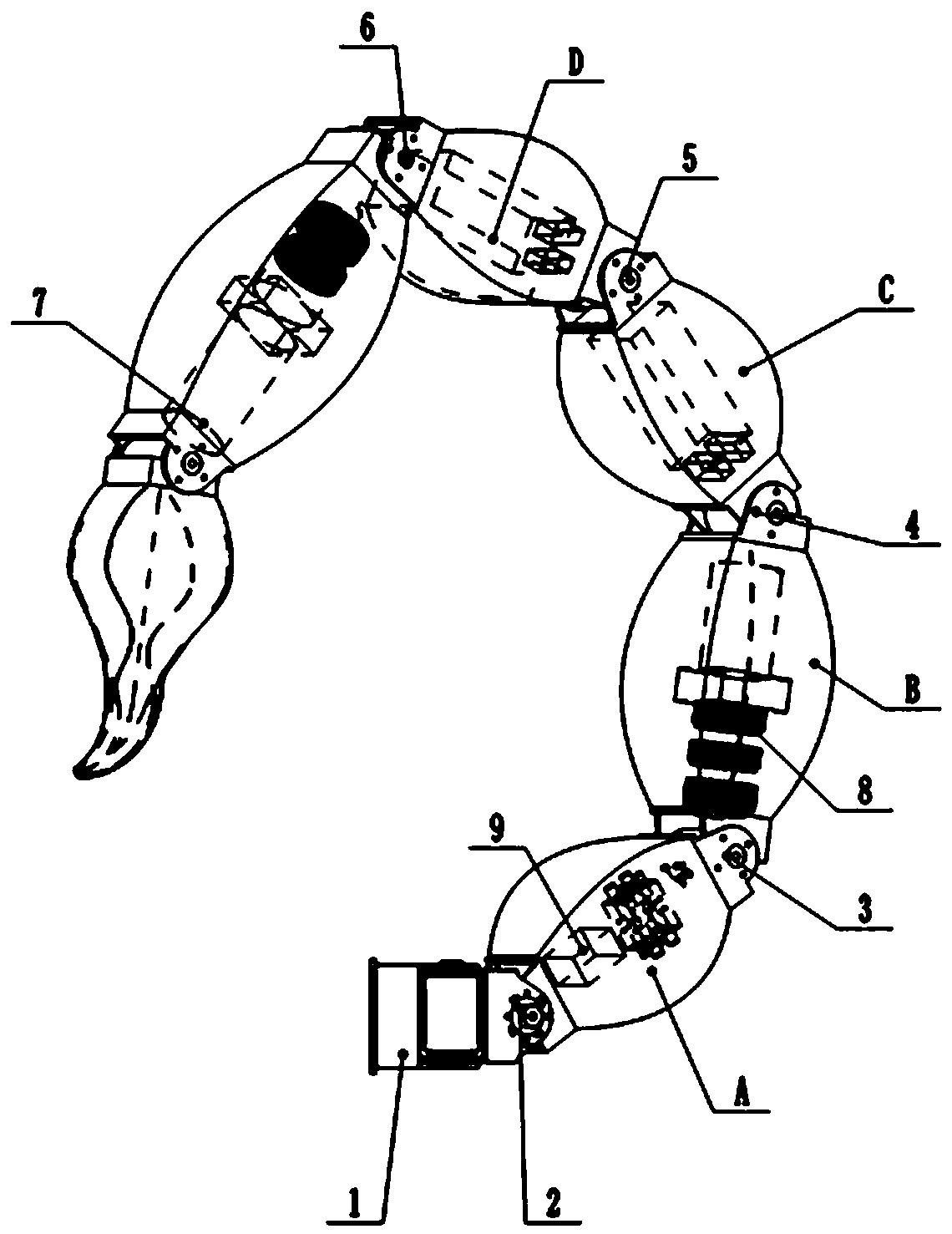
[0043] refer to image 3 , Figure 4 , the multi-joint bionic scorpion tail with autonomous hydraulic distribution power in this embodiment is only different from the embodiment 1 in that the tail section A, tail section B, tail section C and tail section D are made of aluminum alloys to make special-shaped shapes with cavities Components, each tail section is provided with anti-shock vibration damping material parts to reduce the impact damage when attacked. The swinging cylinder 706 and the spraying tail 707, wherein the tail piercing device 7 can spray medicine on the enemy and pierce the body of the enemy to inject medicine when receiving an attack command.
Embodiment 3
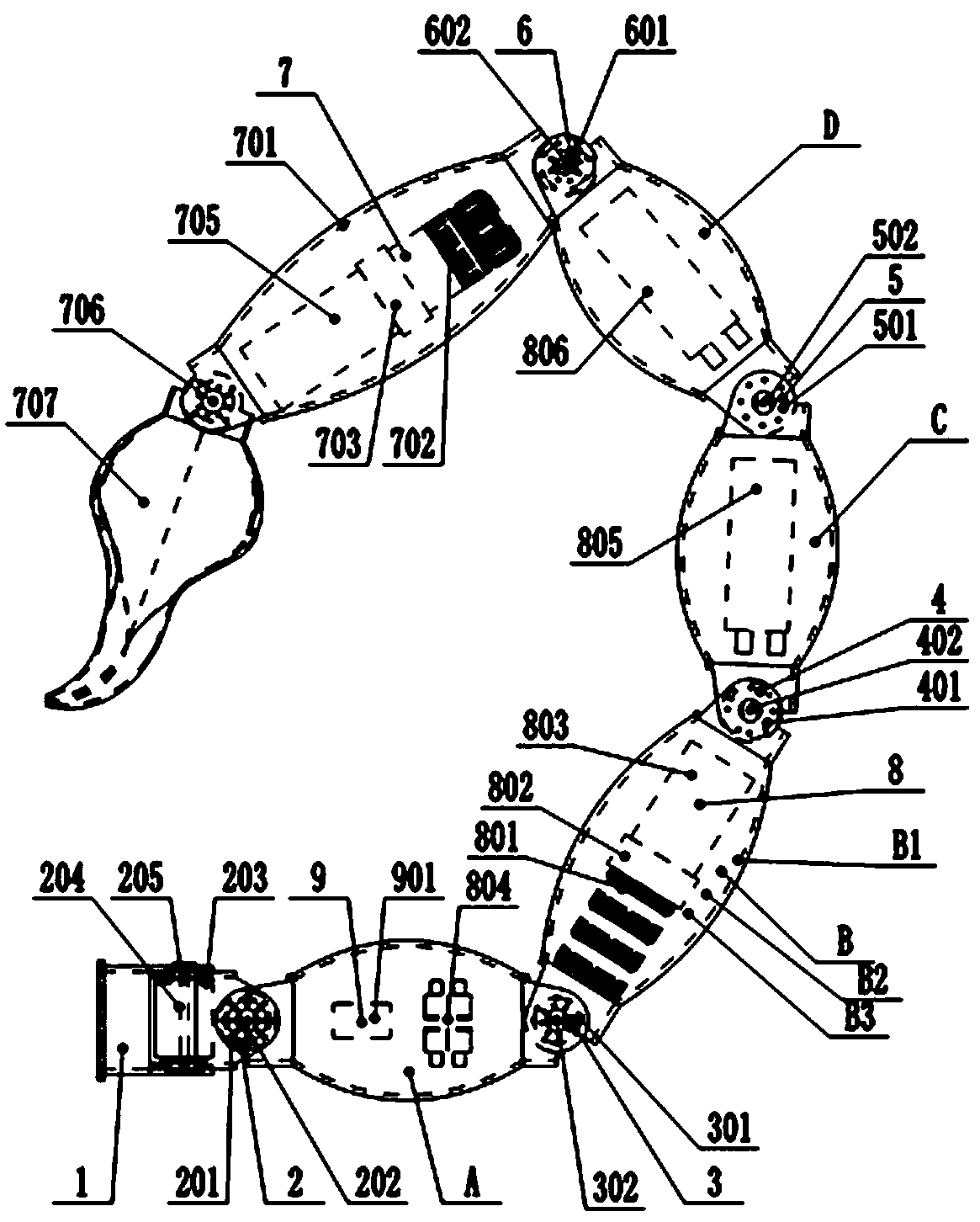
[0045] refer to Figure 5 , Image 6 , Figure 7 , the difference between the multi-joint bionic scorpion tail with autonomous hydraulic power distribution in this embodiment and the embodiment 1 is only that the connecting frame 1 adopts the form of fixed pin holes for quick connection; the tail section A, tail section B, tail section C and The tail section D is made of titanium alloy as a special-shaped component with a cavity, wherein the surface of the tail section B is provided with a solar film member B4 for collecting solar energy. The drive motor 801, the hydraulic pump 802 and the micro fuel tank 803 are arranged in the cavity of the tail section D, the hydraulic solenoid valve group 804 and the controller 901 are arranged in the cavity of the tail section B, and the battery pack I 805 and the battery pack II 806 are arranged in the tail section. Section A and tail section C. The tail thorn device 7 adopts a laser-generated lotus tail thorn structure, which mainly ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More