

A five-axis CNC machining instruction point interpolation method based on tool attitude control
A technology of attitude control and machining instructions, applied in the field of five-axis CNC machining instruction point interpolation based on tool attitude control, can solve problems such as errors, affecting the smoothness of the machining surface, and increasing the burden of data transmission, so as to improve the smoothness of the machining surface , Avoid nonlinear errors, improve the effect of machining accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the objects, technical solutions and advantages of the present invention, the present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments. DETAILED DESCRIPTION OF THE INVENTION The present invention is not intended to limit the invention.
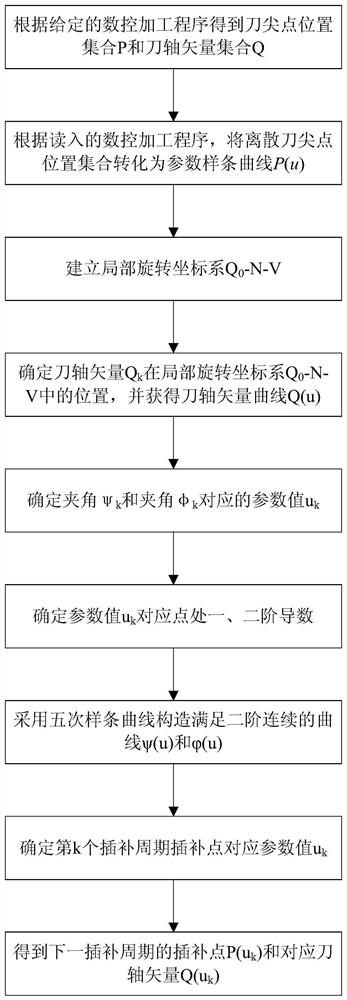
[0049] A five-axis CNC machining instruction point interpolation method based on tool attitude control, figure 1 As shown, the specific method is as follows:
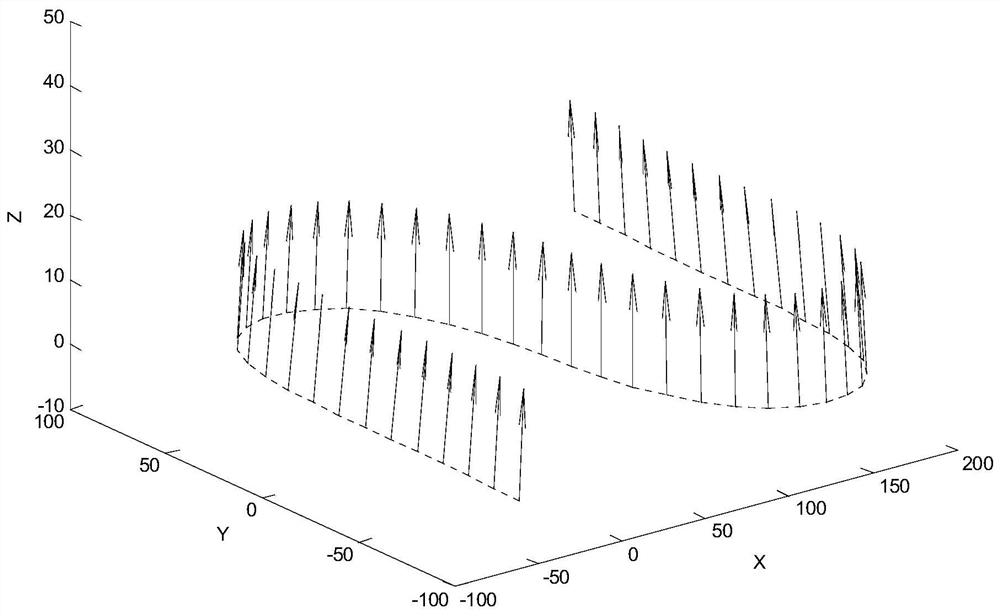
[0050] Step 1: Depending on the machining requirements, use the five-axis CNC machining program to get the knife pin point set P = {P by the given CNC machining program k | P k (P) xk , P yk , P zk ) And p xk , P yk , P zk ∈R, k = 0, ..., n} and knife shaft vector set Q = {Q k | Q k = (Q xk Q yk Q zk ), | Q k | = 1, k = 0, ..., n};
[0051] In the present embodiment, the CNC machining process formed by the knife shaft vector programming is obtained by the tool tip point position set P and the kni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More