

A method, system and device for servo control of a mechanical arm based on screw theory
A servo control and robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of slow response, slow action, and large computational load of the manipulator, achieving good real-time performance, small calculation amount, and accurate tracking. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
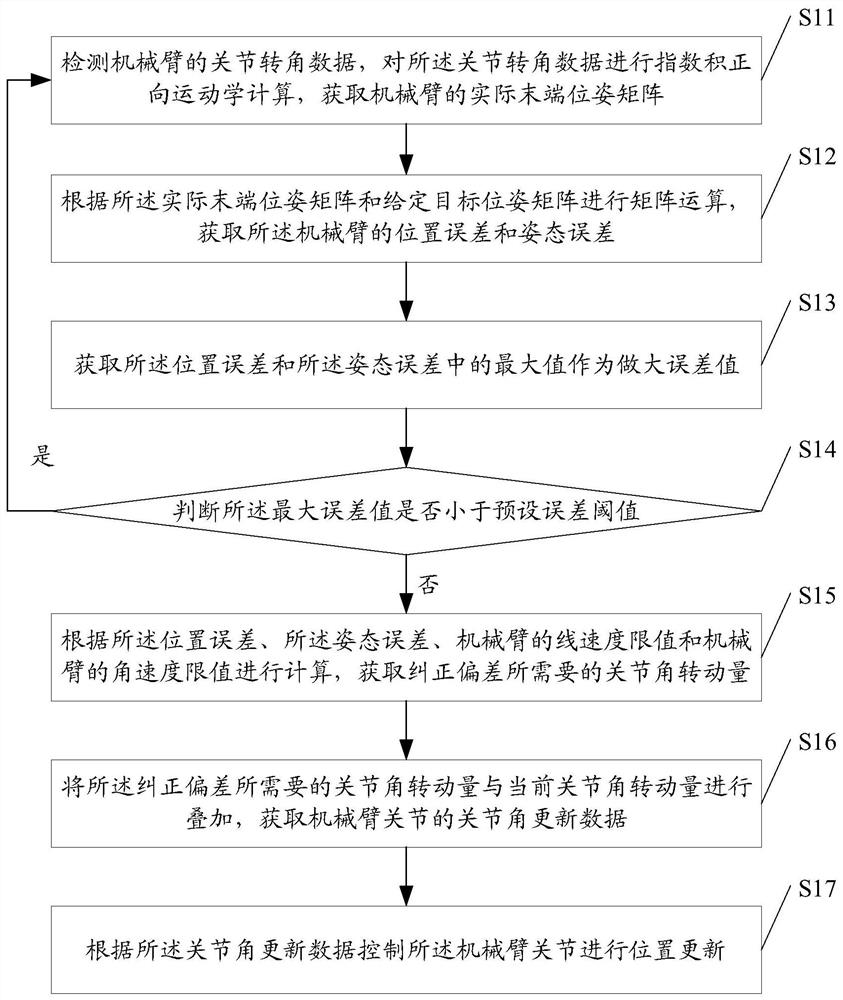
[0064] see figure 1 , figure 1 It is a schematic flow chart of the servo control method of the mechanical arm based on the helix theory in the embodiment of the present invention.
[0065] Such as figure 1 Shown, a kind of mechanical arm servo control method based on spiral theory, described mechanical arm servo control method comprises:
[0066] S11: Detect the joint rotation angle data of the mechanical arm, perform exponential product forward kinematics calculation on the joint rotation angle data, and obtain the actual end pose matrix of the mechanical arm;
[0067] In the specific implementation process of the present invention, the detection of the joint rotation angle data of the mechanical arm, the exponential product forward kinematics calculation is performed on the joint rotation angle data, and the actual terminal pose of the mechanical arm is obtained, including: using the motor shaft installed on the joint The photoelectric encoder on the upper part detects th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More