

Method and system for detecting and calculating uwb anchor point coordinates
A technology of coordinate system and measurement system, applied in the field of ranging, which can solve complex and time-consuming problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0082] All anchors have two functions: respond to ranging; initiate ranging for a target. Tag program, the main function of the tag program is: to initiate a distance measurement for a certain target; without changing the above functions, we change the tag program to an algorithm that automatically detects and calculates the coordinates of the uwb anchor point, and the special tag Defined as a detector.
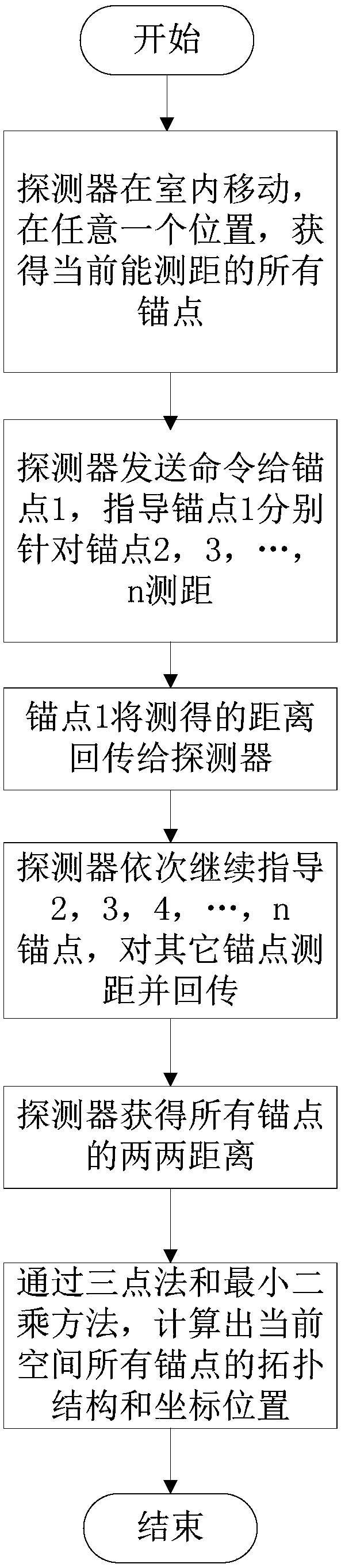
[0083] attached Figure 1-2 It can be seen that a method for detecting and calculating uwb anchor point coordinates, which adopts uwb anchor point, uwb tag and detector, and the detector locates the tag by ranging, comprises the following steps:
[0084] Step 1. The detector moves indoors. At any position, obtain all the anchor points that can be measured currently. Assume that there are n anchor points in the current range, marked as 1, 2, 3, ..., n;
[0085] Step 2, the detector sends a command to anchor point 1, instructing anchor point 1 to measure distances for anchor ...
Embodiment 2
[0116] All anchors have two functions: respond to ranging; initiate ranging for a target. Tag program, the main function of the tag program is: to initiate a distance measurement for a certain target; without changing the above functions, we change the tag program to an algorithm that automatically detects and calculates the coordinates of the uwb anchor point, and the special tag Defined as a detector.
[0117] A measurement system for detecting and calculating the coordinates of uwb anchor points, including uwb anchor points, uwb tags and detectors, there are n anchor points, which are configured to receive ranging commands sent by the detectors, perform ranging according to the instructions, and The measured distance is sent back to the detector; the uwb tag is configured to receive the detector signal in real time and report the tag information to the detector; the detector is configured to locate the uwb tag by obtaining the position of the uwb anchor point for distance m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More