

Fractional order sliding mode optimization control method for flexible joint mechanical arm
A technology of fractional-order sliding mode and flexible joints, which is applied in manipulators, adaptive control, general control systems, etc., can solve problems such as unsatisfactory control effects and weaken chattering phenomenon of sliding mode motion, and achieve good chattering effect, The effect of good robustness and good approximation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
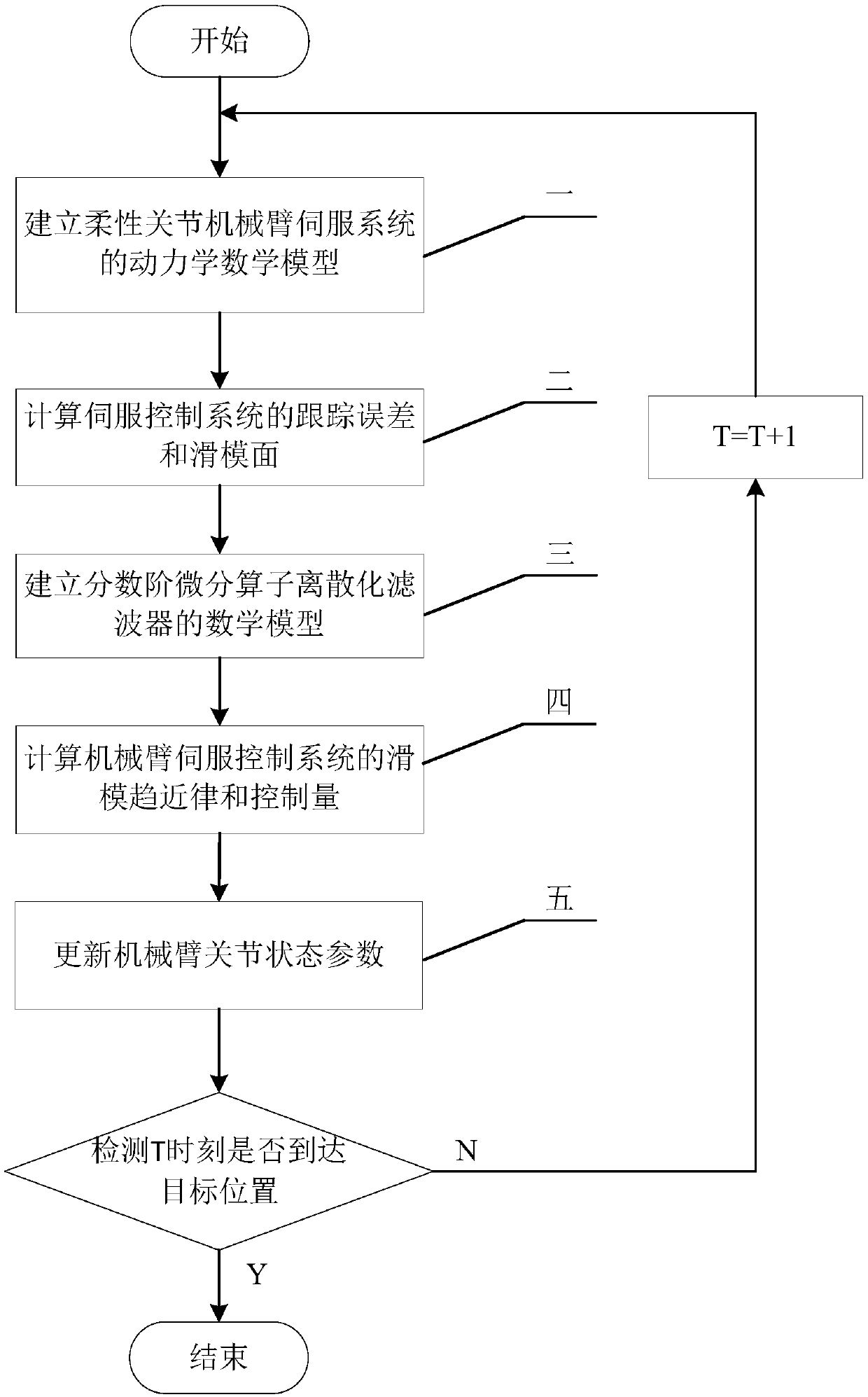
[0068] Such as figure 1 As shown, the fractional-order sliding mode optimization control method of the flexible joint manipulator proposed by the present invention has the following steps:
[0069] Step 1. Establish a dynamic mathematical model of the flexible joint manipulator servo system;
[0070] This step describes the calculation of the dynamics mathematical model of the servo system of the manipulator, and its expression is
[0071]
[0072] In the formula, M(q) is the inertia matrix of the manipulator, is the centrifugal force and Gothic force term, G(q) is the gravity matrix of the manipulator, τ ext is the external load disturbance of the manipulator, and u is the output control quantity.
[0073] Take the following parameters as an example to establish the dynamic model of the flexible joint manipulator:
[0074] Moment of inertia of manipulator load: J a =1.6×10 -5 kg.m 2 ;
[0075] Moment of inertia of the motor: J=2.56×10 -4 kg.m 2 ;
[0076] Join...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More