

An event-triggered multi-sensor fusion estimation method in correlated noise environment
An event-triggered, noise-related technology, applied in the direction of instruments, radio wave reflection/re-radiation, measurement devices, etc., can solve the problems of inability to effectively overcome radar system interference, poor tracking effect, etc., to save network bandwidth and transmission energy. power consumption, improve accuracy, overcome system noise, and observe noise-related effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0096] In order to make the purpose of the present invention, technical scheme and advantage clearer, the following examples illustrate the present invention:
[0097] Hardware environment: computer; correlator
[0098] Software configuration: Windows 2000 / XP; any language environment software such as matlab or C language or C++.
[0099] The technical scheme of the present invention will be further described in detail below by means of the accompanying drawings and examples.
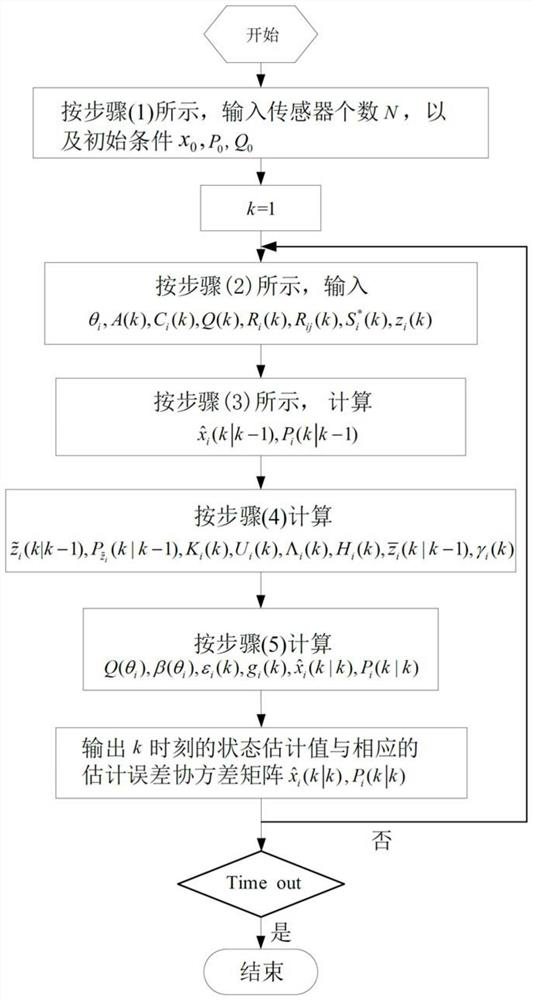
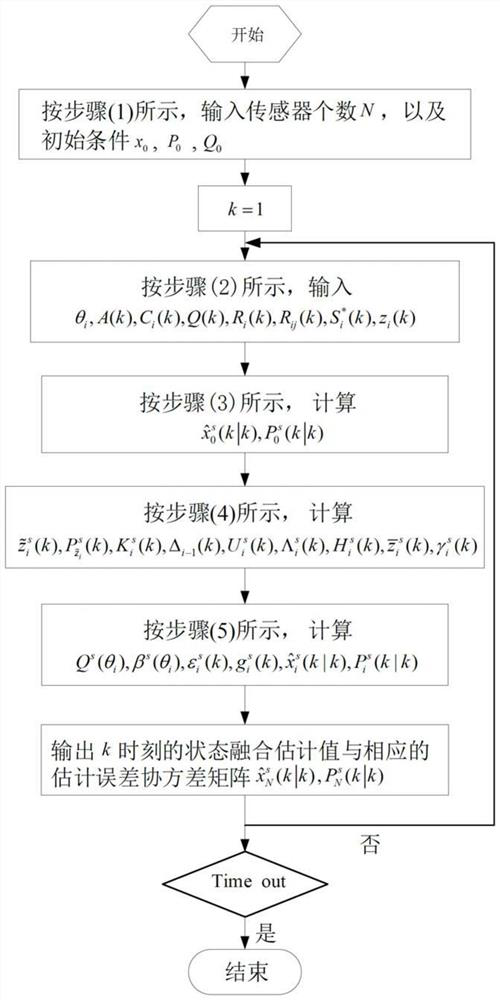
[0100] The block diagrams of event-triggered Kalman filter estimation method and multi-sensor sequential fusion estimation method in correlated noise environment are as follows: figure 1 , as shown in 2.
[0101]A multi-rate sensor, discrete-time linear dynamical system with N sensors observing the same target can be described as x(k+1)=A(k)x(k)+w(k), k=0,1,…
[0102] z i (k)=C i (k)x(k)+v i (k), i=1,2,...,N
[0103] where x(k)∈R n is the system state A(k)∈R n×n is the state transition matrix, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More