

Novel robot outside mirror system
A technology of robots and external mirrors, applied in the field of medical devices, can solve problems such as increased patient pain and surgical risks, inability to make timely diagnosis, and long waiting time for results, so as to improve efficiency and surgical accuracy, improve surgical collaboration efficiency, The effect of reducing waiting time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
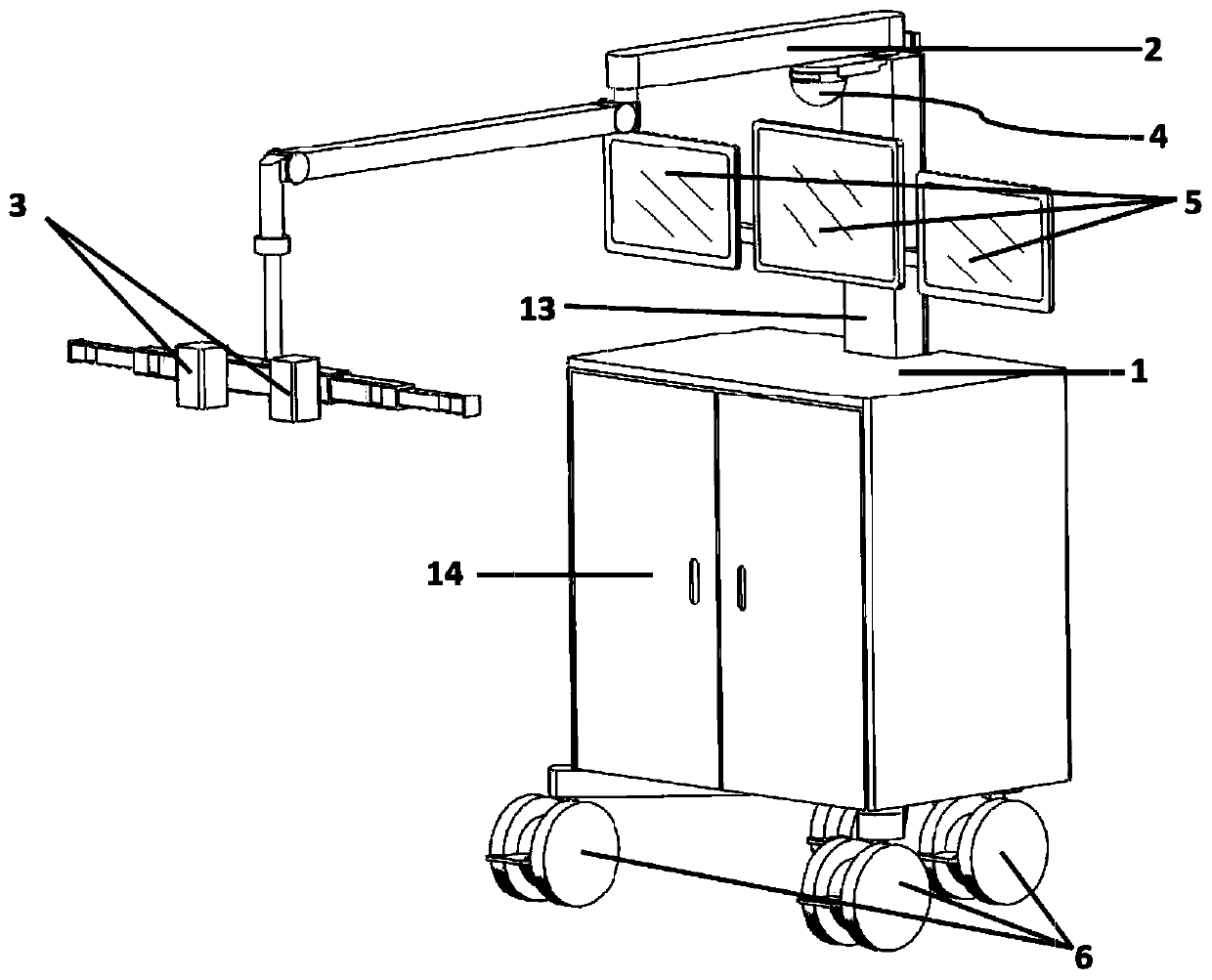
[0051] Such as figure 1 As shown, this embodiment provides a mobile robot exterior mirror system, which is mainly presented in the form of a mobile robot, including a robot carrier and an imaging system.
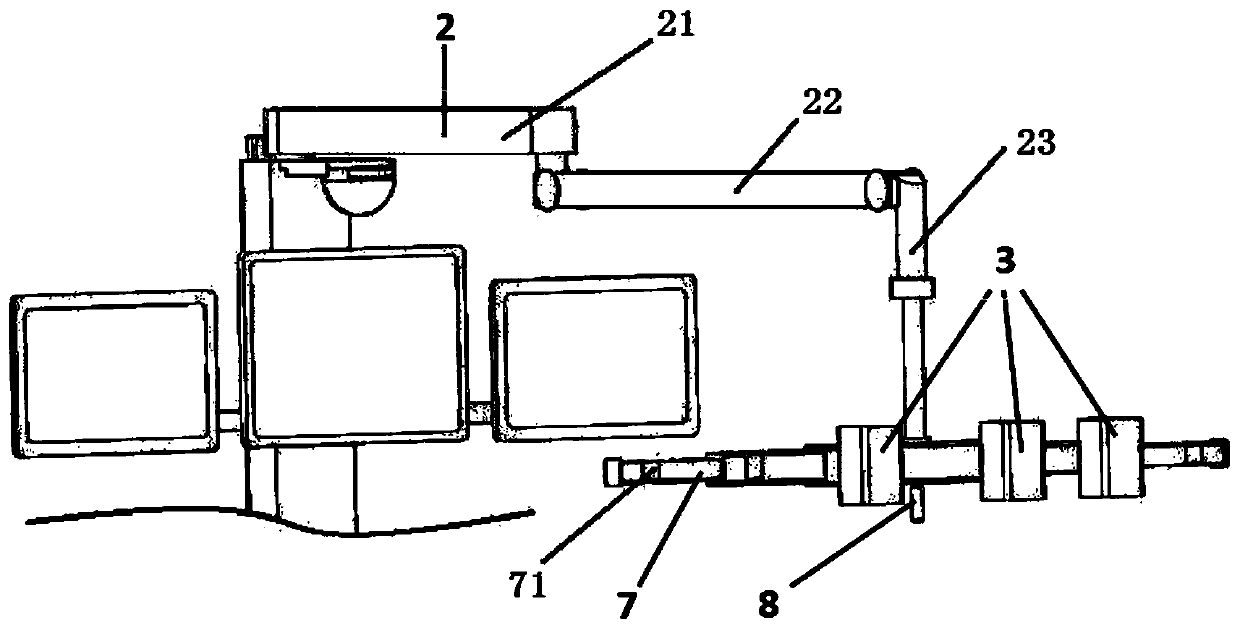
[0052] The robot carrier includes a robot arm 2 and a rectangular frame 1 . The base of the frame 1 is provided with four universal wheels 6 with a locking function; specifically, the base of the frame 1 is two main rods formed by intersecting each other at 90°, and the two main rods are connected to each other. The intersecting position is located at the rear section of the main pole, and the fixed column 13 of the robot arm 2 is vertically fixed on the intersection of the two main poles. The rear portion of the frame 1 is recessed, and the fixed column 13 That is, it is embedded in the depression; in addition, a wire groove is arranged in the fixed column 13 , and the top of the fixed column 13 is hingedly connected to the fixed end of the robot arm 2 .
[0053] The imag...
Embodiment 2
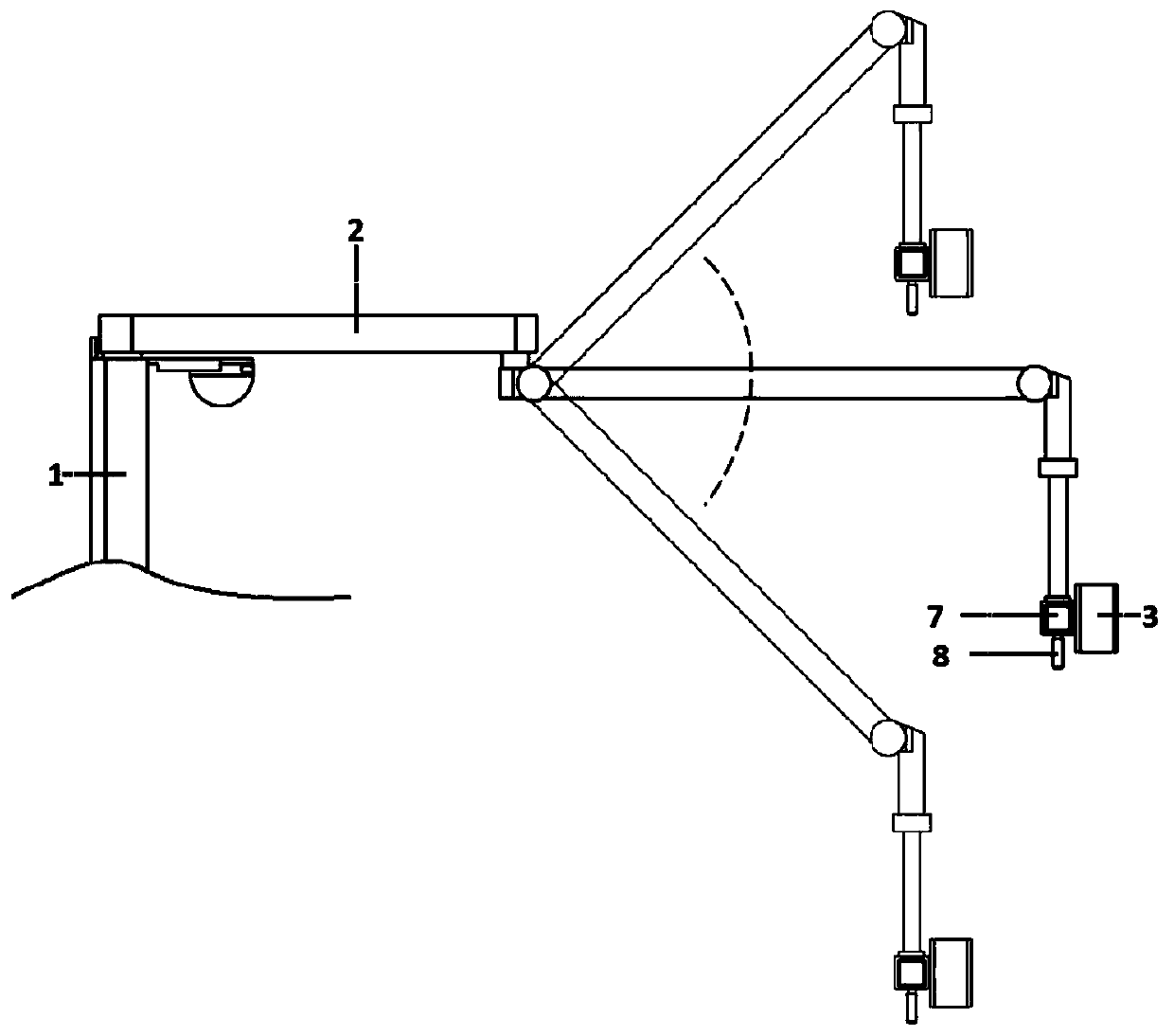
[0072] Such as Figure 17-18As shown, the similarities with Embodiment 1 will not be repeated. A pendant-type robot exterior mirror system provided in this embodiment is presented in the form of a pendant-type robot exterior mirror, including fixed installation on the ceiling The first carrier 11 and the second carrier 12, the first robot arm 111 and the second robot arm 121.
[0073] The first carrier 11 is used to carry the field camera 3, the scene camera 4 and the display 5, the second carrier 12 is used to carry the frame 1 storing the data processing host 142, the first carrier 11 and the The second carriers 12 are respectively suspended and fixed on the ceiling of the operating room. Further, the first carrier 11 is provided with two first robot arms 111 respectively corresponding to the display 5 and the camera; the second robot arm 121 provided also has the function of rotation adjustment, and the frame 1 is hoisted at the active end of the second robotic arm 121 . ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More