Machine body equivalent connecting rod model establishment method and multi-leg coordination control method
A technology of model building and fuselage, applied in the direction of attitude control, etc., can solve the problem of lack of effective foot trajectory and body motion planning methods, troubles, inability to directly plan and plan foot trajectory in the body coordinate system, it is inconvenient to use predecessors Research results and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] In order to make the objectives, technical solutions, and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
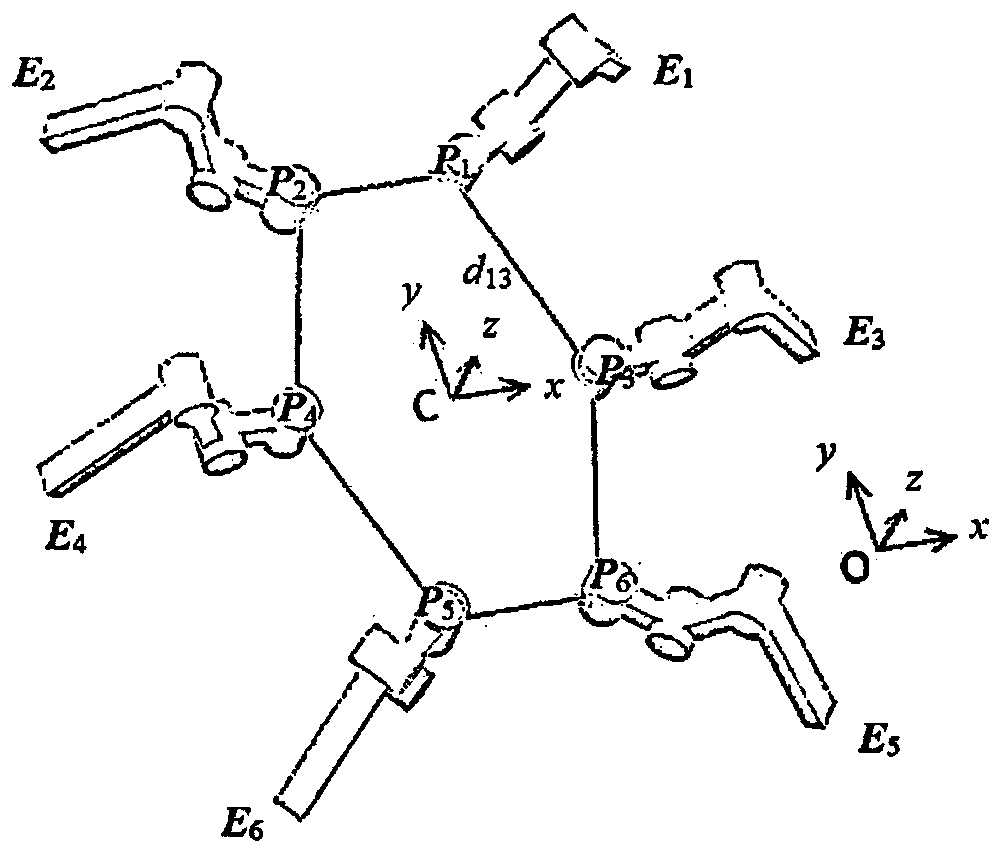
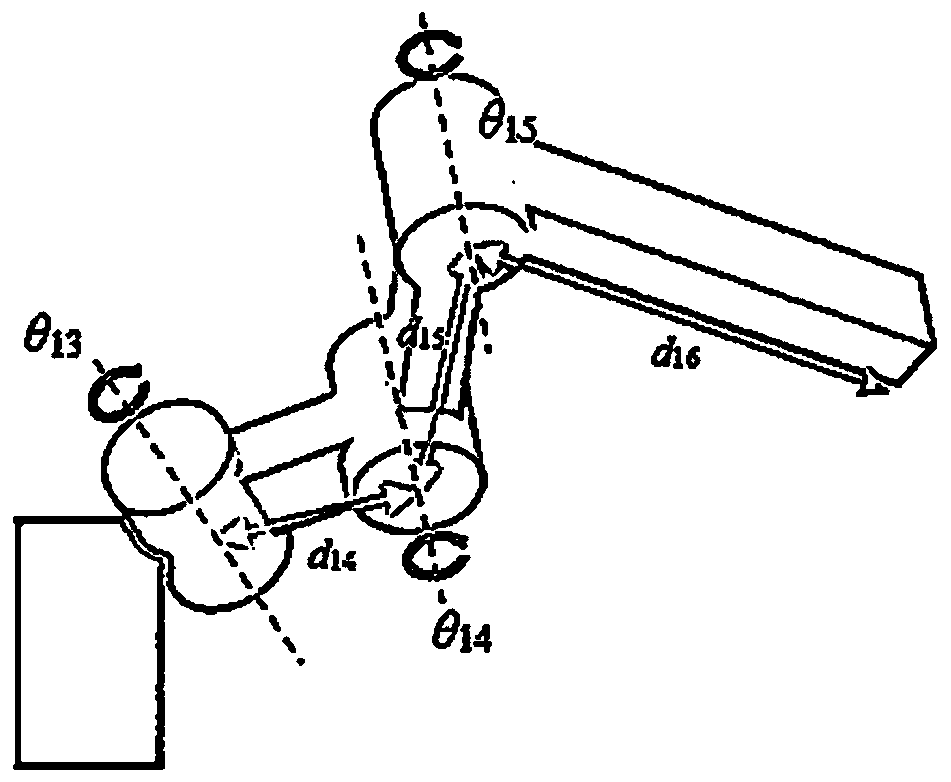
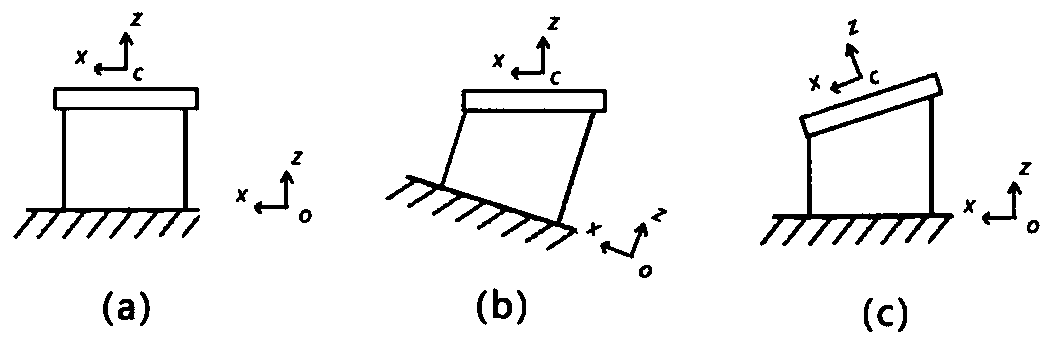
[0088] In the present invention, the upper surface of the fuselage is equivalent to six 2-degree-of-freedom links to simulate the posture change of the fuselage, to ensure the synchronization of the fuselage coordinate system and the reference coordinate system, and avoid the foot end trajectory planned under the fuselage coordinate system from being reference Distortion occurred in the coordinate system; the physical model was established by using the DH parameter method, and the analytical solutions of forward kinematics and inverse kinematics were derived, and on this basis, the joint rotation angle solver was establis...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap