

Pole tower model matching and visual navigation-based power unmanned aerial vehicle and inspection method
A tower model and visual navigation technology, applied in position/direction control, electrical digital data processing, non-electric variable control, etc., can solve problems such as national power facility safety risks, reduce modeling workload, improve efficiency, reduce cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052]The present invention will be further described below. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
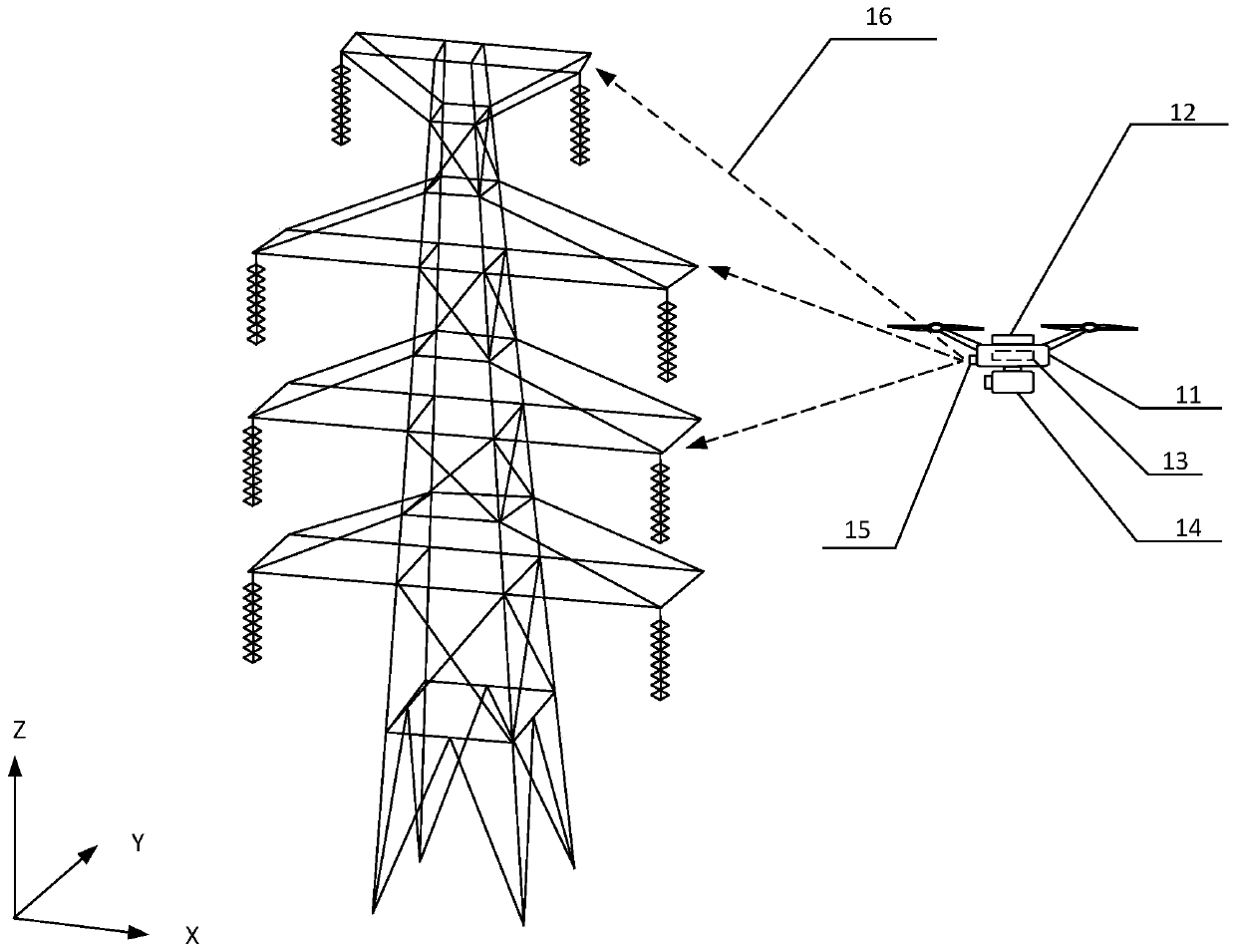
[0053] The present invention provides an electric unmanned aerial vehicle based on tower model matching and visual navigation, see image 3 , consists of the following parts: drone body 11, drone flight controller 13, front-end AI processing platform 12, binocular vision sensor 15, gimbal and camera 14. The UAV flight controller 13 is installed inside the UAV body to control the flight attitude of the UAV. The binocular vision sensor 15 is installed directly in front of the UAV body 11. The sensor is used to collect the depth image of the front end of the unmanned aerial vehicle. The cloud platform and the camera 14 are integrally installed, and are jointly installed at the bottom of the drone body 11. It is used to collect visible light i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More