

Walking assisting flexible exoskeleton and control method thereof
A technology of walking assistance and exoskeleton, which is applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc., can solve the problems of enlarged radial volume, difficulty in precise control, unsuitable for limited space, etc., to improve safety and comfort , solve the effect of state judgment lag and no risk of explosion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with the accompanying drawings and specific examples of implementation, but not as a limitation of the present invention.
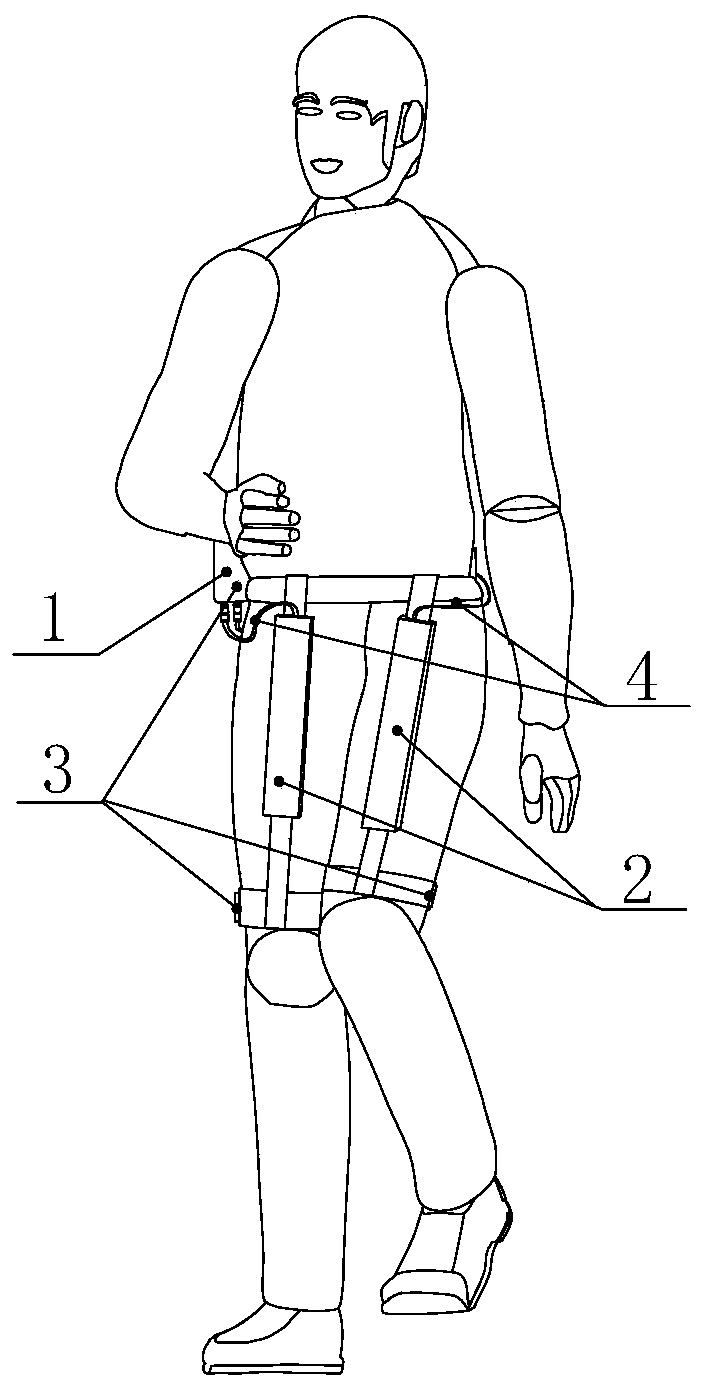
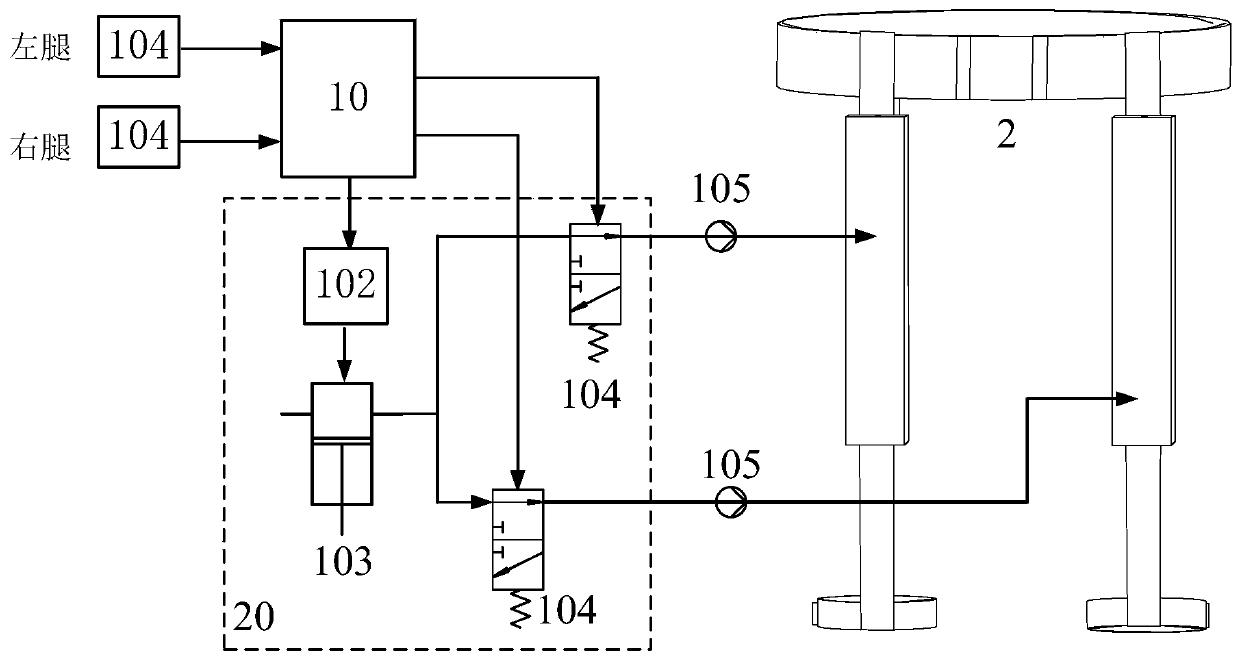
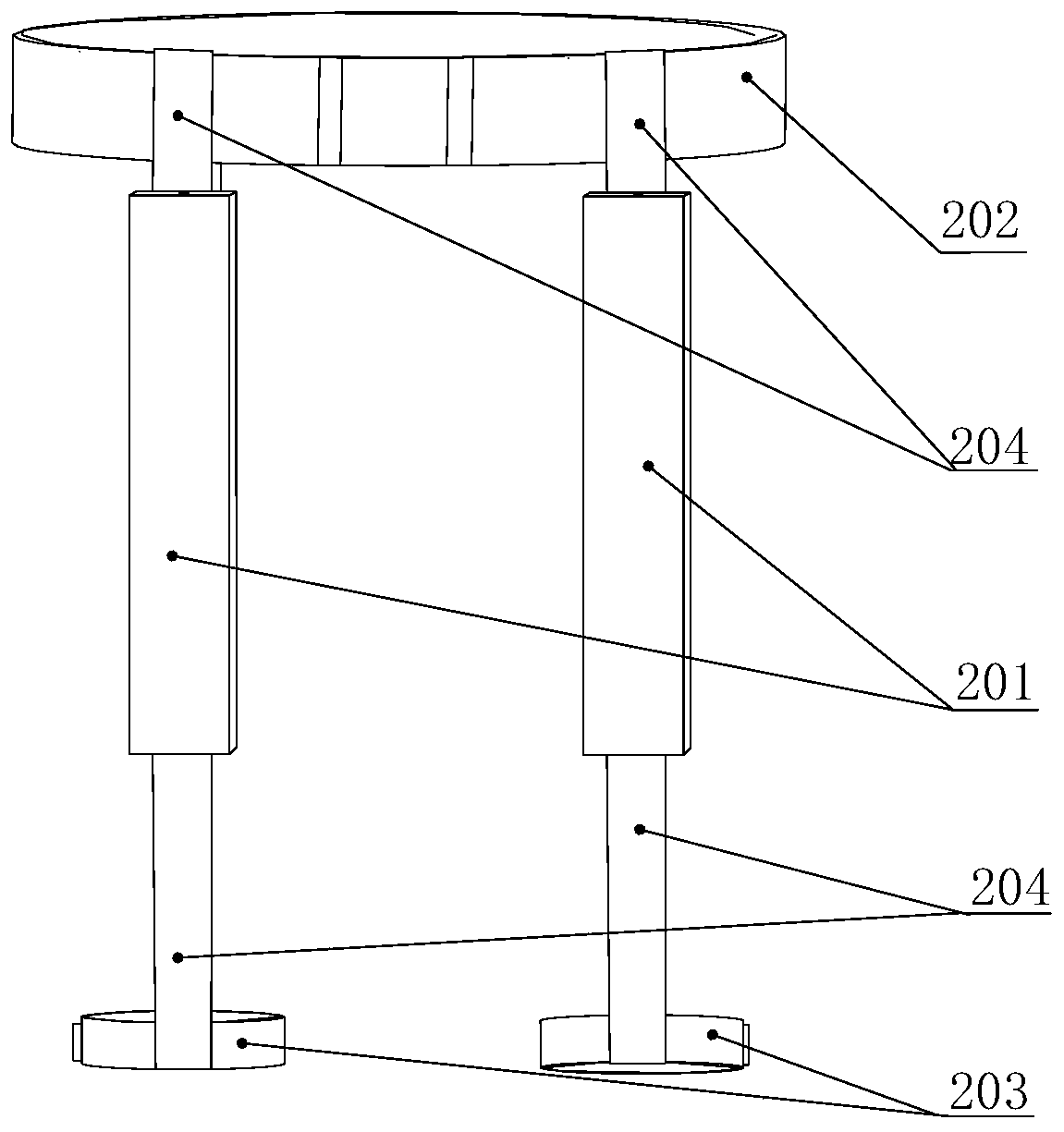
[0044] figure 1 It is a schematic diagram and composition diagram of the flexible exoskeleton of the present invention, figure 2 is the control scheme diagram of the flexible exoskeleton system, such as figure 1 with 2 As shown, the flexible exoskeleton mainly includes a control system 1, a pneumatic flexible execution system 2, a detection system 3, and a trachea assembly 4, etc.
[0045] The control system 1, such as figure 1 with 2 As shown, it is the core components of the flexible exoskeleton installation and fixation, electronic data reception, processing, instruction sending and air pressure output control; the control system mainly includes a control module 10, an air pressure output module 20 and an installation module, wherein the air pressure output module 20 main...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More