A method and device for data synchronization for unmanned driving
A technology for data acquisition and unmanned driving, which is applied in control devices, measuring devices, and navigation through speed/acceleration measurement. Algorithm development impact and other issues to achieve the effect of avoiding inaccurate data time difference, improving accuracy, and enriching data types
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
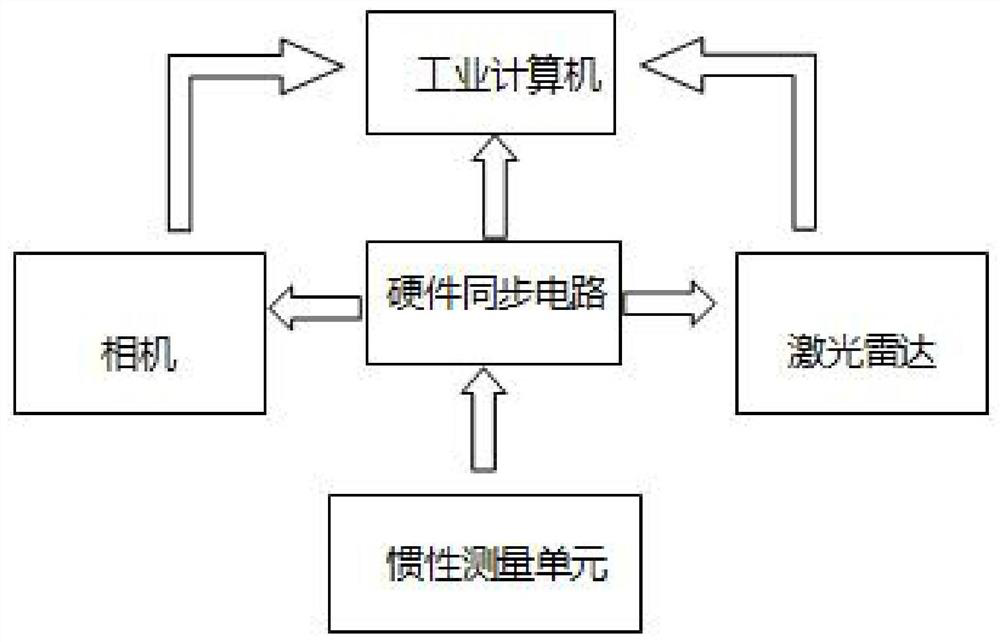
[0039] The invention discloses a method for unmanned driving to obtain data synchronization, the specific steps are as follows:
[0040] The first step is to receive the acquisition information sent by the inertial measurement unit, including angular velocity, acceleration, and the number of data packets that have been sent, as well as a fixed-frequency pulse signal for synchronization.
[0041]The second step is to synchronize the camera sensor and set the camera sensor to the external trigger mode to ensure that it can trigger the camera sensor to collect images when there is an external rising edge signal, and calculate the number of data packets sent by the inertial measurement unit. When it is an integer multiple of the frequency division number of the camera sensor, a high-level pulse trigger signal is output to the camera sensor to trigger the camera sensor to perform image acquisition, where the frequency division number of the camera sensor is the pulse trigger frequen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More