

A trajectory planning method for UAV swarm cooperative detection and obstacle avoidance
A technology for trajectory planning and drones, applied in the field of drones, which can solve the problems of not considering the constraints of drones, the track may not be flyable, and the track is short.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
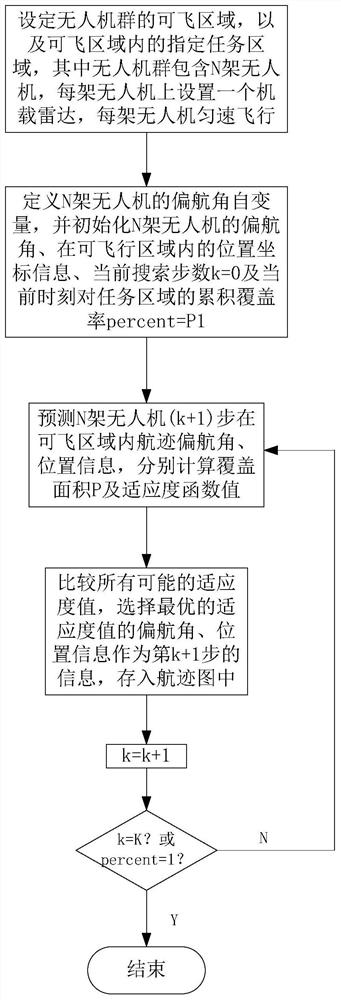
[0026] See figure 1 , figure 1 It is a flow chart of a UAV swarm cooperative detection and obstacle avoidance track planning method provided by an embodiment of the present invention. As shown in the figure, the track planning method of this embodiment includes:
[0027] S1: Set the flying area A of the UAV group, the designated task monitoring area S in the flying area A, and analyze the stress situation of the UAV at the same time, and divide the UAV within the maximum turning angle constraint The prediction target node of the next moment of the UAV, and calculate its node gain weight, the UAV group contains N UAVs, and an airborne radar is set on each UAV, and each UAV The machine flies at a constant speed;
[0028] Specifically, including:
[0029] S11: Setting the flyable area A of the drone swarm and the task monitoring area S, wherein, when the drone swarm performs a flight mission, the safe area where the drone swarm is allowed to fly is the flyable area A, the tas...
Embodiment 2
[0101] This embodiment provides a simulation experiment about the track planning method in Embodiment 1. In this embodiment, please refer to Table 1 for the simulation experiment conditions.
[0102] Table 1 Simulation experiment conditions
[0103]
[0104] See Figure 4 , Figure 4 It is a schematic diagram of the position of the unmanned aerial vehicle group at the initial moment in a simulation experiment provided by the embodiment of the present invention. As shown in the figure, the four symbols in the figure represent the unmanned aerial vehicles respectively. Please refer to Figure 5 and Figure 6 , Figure 5 It is a simulation experiment provided by an embodiment of the present invention to obtain a flight path planning result map; Figure 6 yes Figure 5 The enlarged view of the obstacle area in the middle, the different curves in the flyable area A in the figure represent the track planning trajectories of the four unmanned aerial vehicles respectively, it...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More