

Self-adaptive machining method for manipulator
A processing method and manipulator technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of not considering sensor value deviation, difficulty in ensuring stability, and affecting processing accuracy, so as to avoid sensor value deviation and improve processing stability performance, to achieve the effect of stable contact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The invention will be further described below in conjunction with specific embodiments:
[0036] This embodiment provides a manipulator adaptive processing method, which is also a manipulator processing control method. The manipulator used in this processing method can be a conventional manipulator. In this embodiment, a multi-joint series manipulator is used as an example for illustration. The type of grinding can be conventional cutting, grinding or polishing. In this embodiment, grinding is taken as an example for illustration.
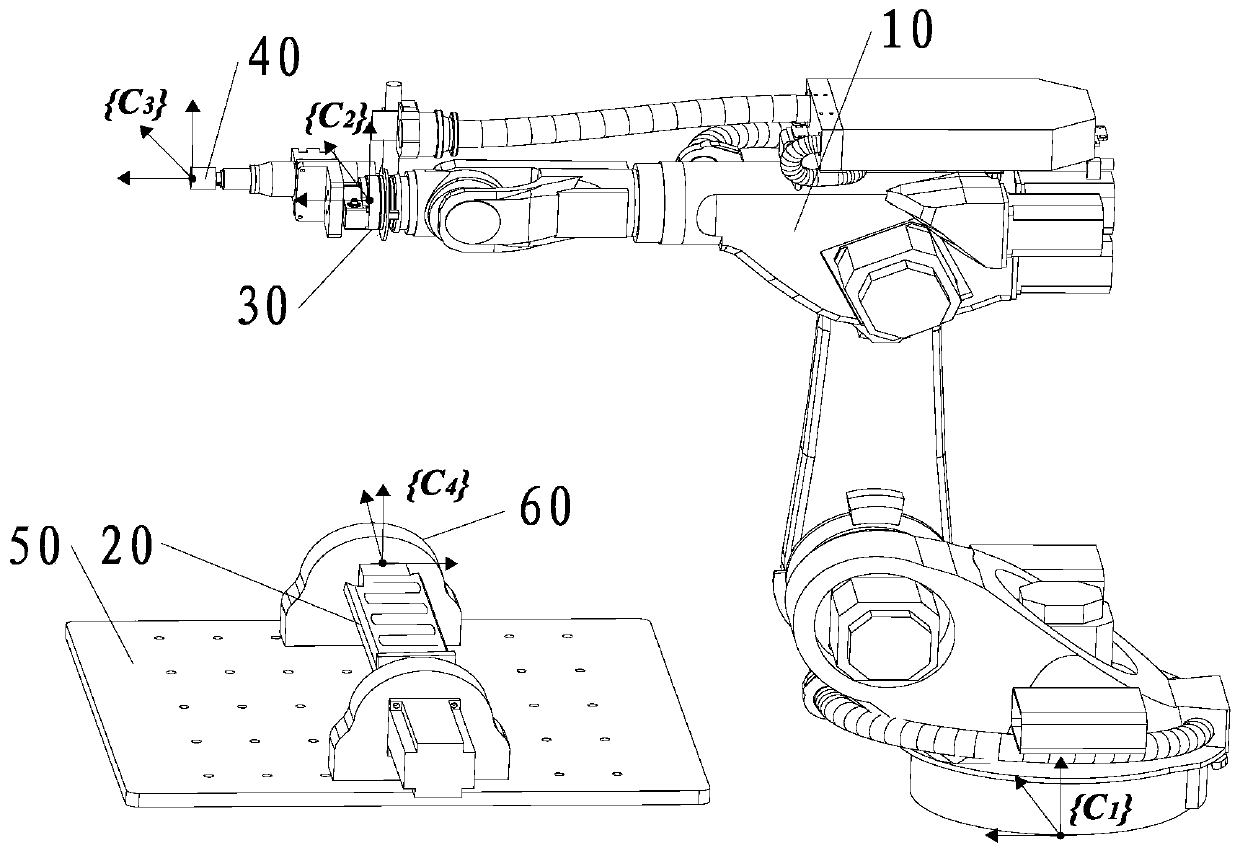
[0037] Such as figure 1 As shown, the end of the manipulator 10 is equipped with a sensor 30 for collecting the contact force between the manipulator 10 and the workpiece 20. The sensor 30 is a conventional force sensor or torque sensor, and the processing tool is installed on the sensor 30. In this embodiment , the processing tool is a grinding head 40, and the grinding head 40 is installed on the sensor 30 through a rotating shaft. Next ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More