

Line drive based inclination angle adjustment mechanical arm and fruit picking device
A wire-driven, robotic arm technology, used in pickers, manipulators, program-controlled manipulators, etc., can solve the problems of lowering fruit picking efficiency and difficulty in accurately reaching the designated position at the end of the manipulator, achieving flexible movement in a small range and reducing drive frequency, to ensure the effect of fast response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
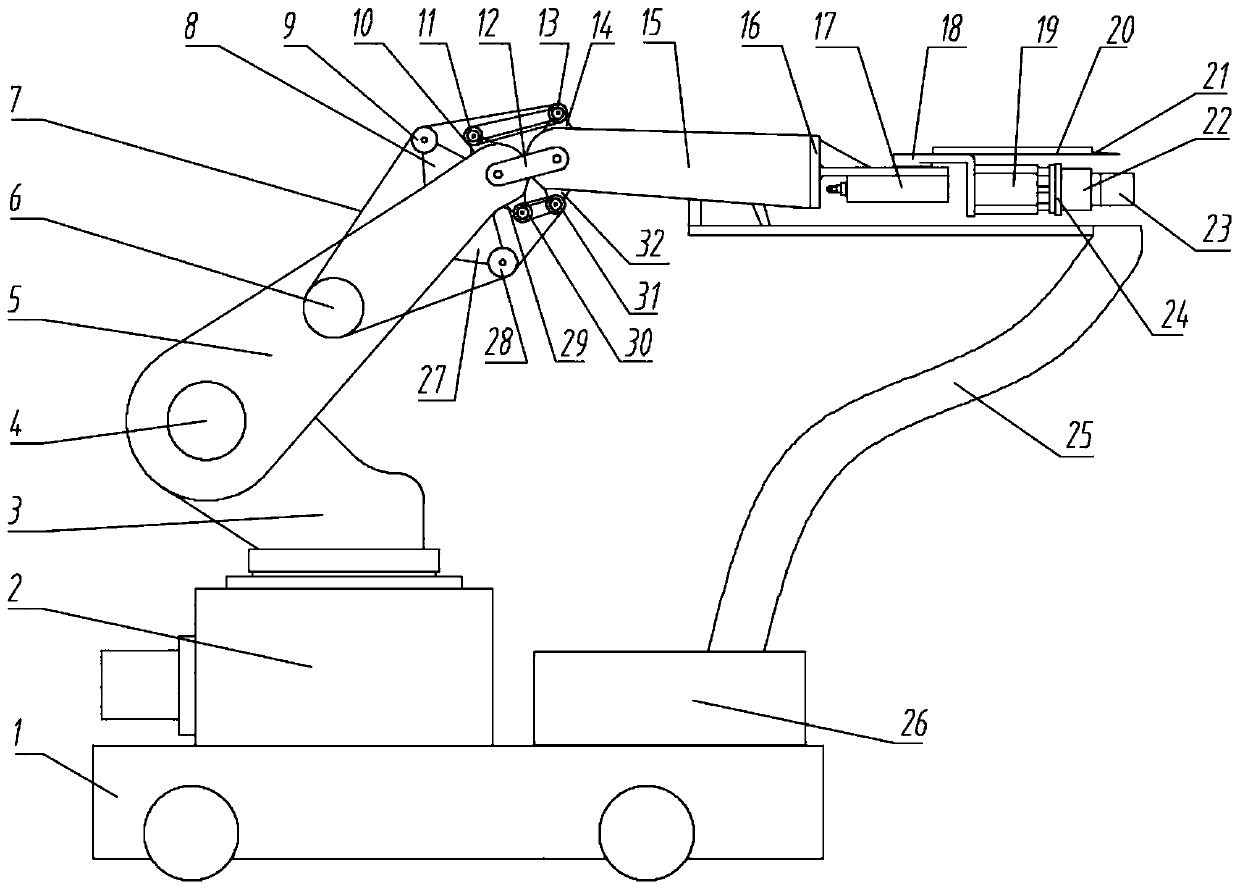
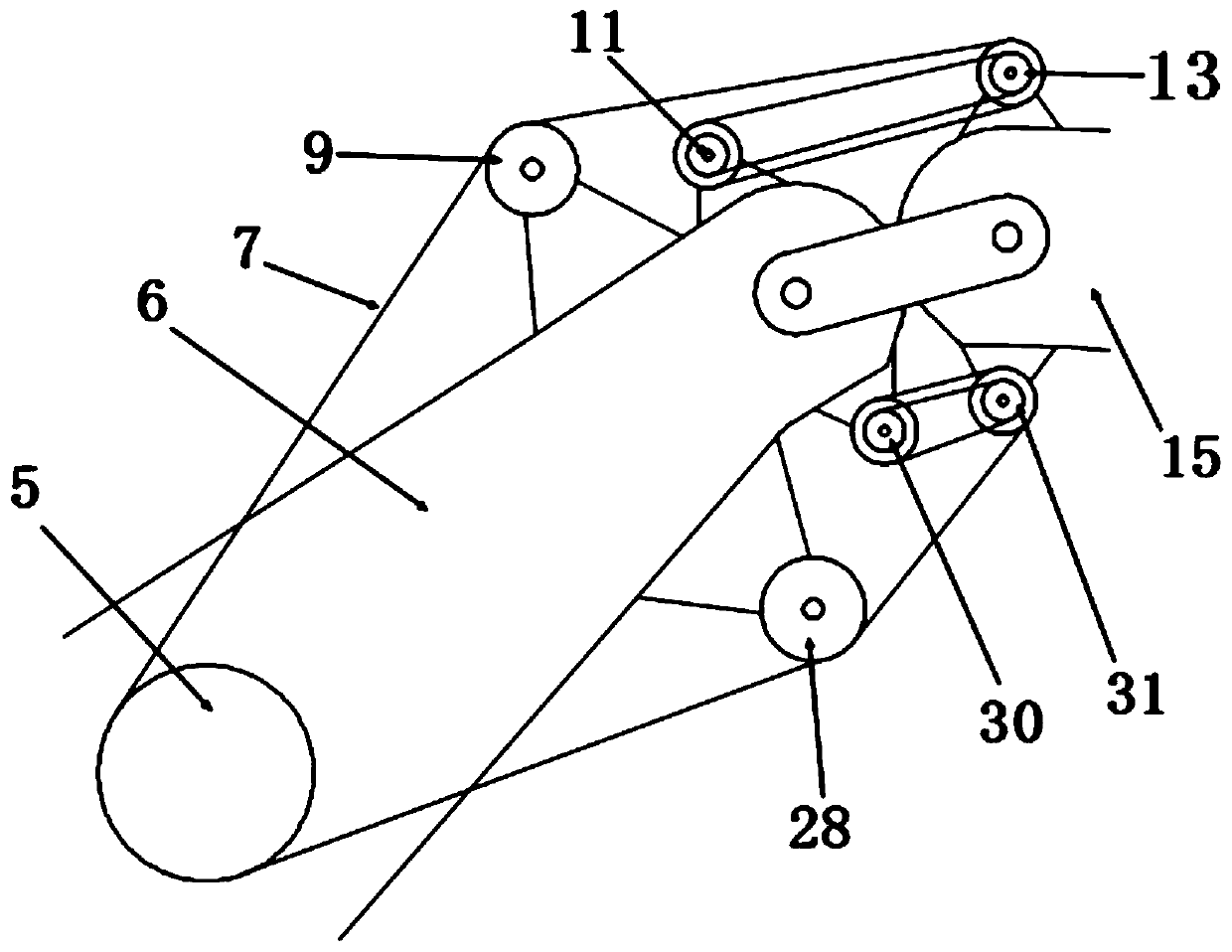
[0031] In a typical implementation of the present application, such as Figure 1-Figure 3 As shown, a fruit picking device equipped with a mechanical arm that adjusts the inclination based on wire drive is proposed.
[0032] combine figure 1 As shown, a base 1 is included, and the top of the base is provided with a drive arm 3 and a collection box. The drive arm is installed on the base through a rotary mechanism 2, and the rotary mechanism can drive the drive arm to perform rotary motion in the horizontal plane, thereby The orientation of the driving arm is adjusted to adjust the working range; the rotary mechanism can be selected from a rotating pair, and the motor is driven by a gear to drive it to rotate.
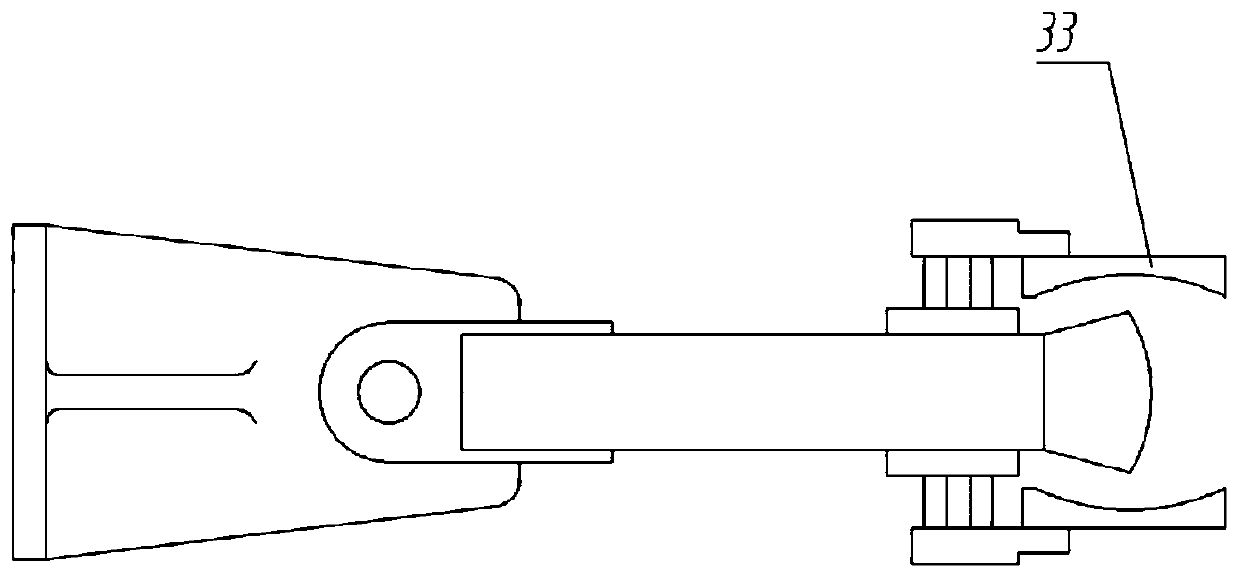
[0033] The end of the drive arm away from the base is equipped with a mechanical arm that adjusts the inclination based on line drive, and the end of the mechanical arm that adjusts the inclination based on line drive is equipped with a manipulator, and the manipulator...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More