

ZYNQ-based multi-axis multi-motor servo device and control method thereof
A technology of a servo device and a control method, applied in the field of servo drive, can solve the problems of inconvenient control algorithm and drive interface implementation, chip-level interconnection bandwidth easily becoming a bottleneck, single position information collection, etc., so as to facilitate integration and expansion, and improve control accuracy. and anti-interference ability, the effect of simplifying system design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
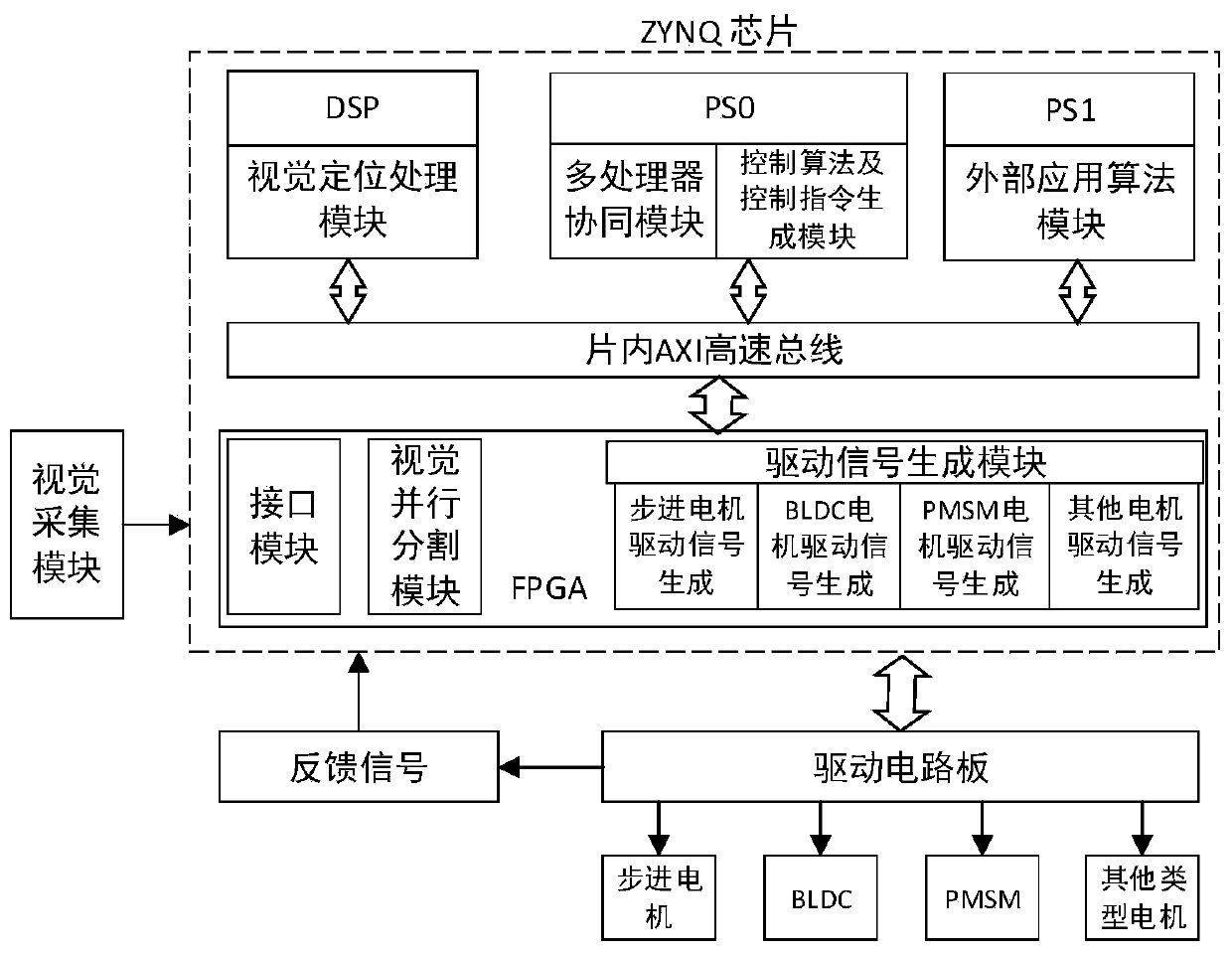
[0035] The present invention proposes a multi-axis multi-motor servo device based on ZYNQ, including a visual acquisition module, an interface module, a visual parallel segmentation module, a visual positioning processing module, a multi-processor coordination module, a control algorithm and a control instruction generation module, and an external application algorithm module, driving signal generating module and driving circuit board;
[0036] like figure 1 As shown, the ZYNQ chip is a Xilinx ZYNQ 7030 chip, which includes two parts: processing system PS and programmable logic PL, wherein PS includes ARM cores PS0, PS1 and memory DDR, PL includes FPGA and DSP, and PS and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More