Sensorless self-adaptive phase-commutation error compensation method of magnetically suspended control moment gyroscope brushless direct-current motor
A technology for controlling torque gyroscopes and brushed DC motors, applied in attitude control and other directions, can solve problems such as inability to disassemble and repair the motor, reduced installation accuracy, and inaccurate assumptions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
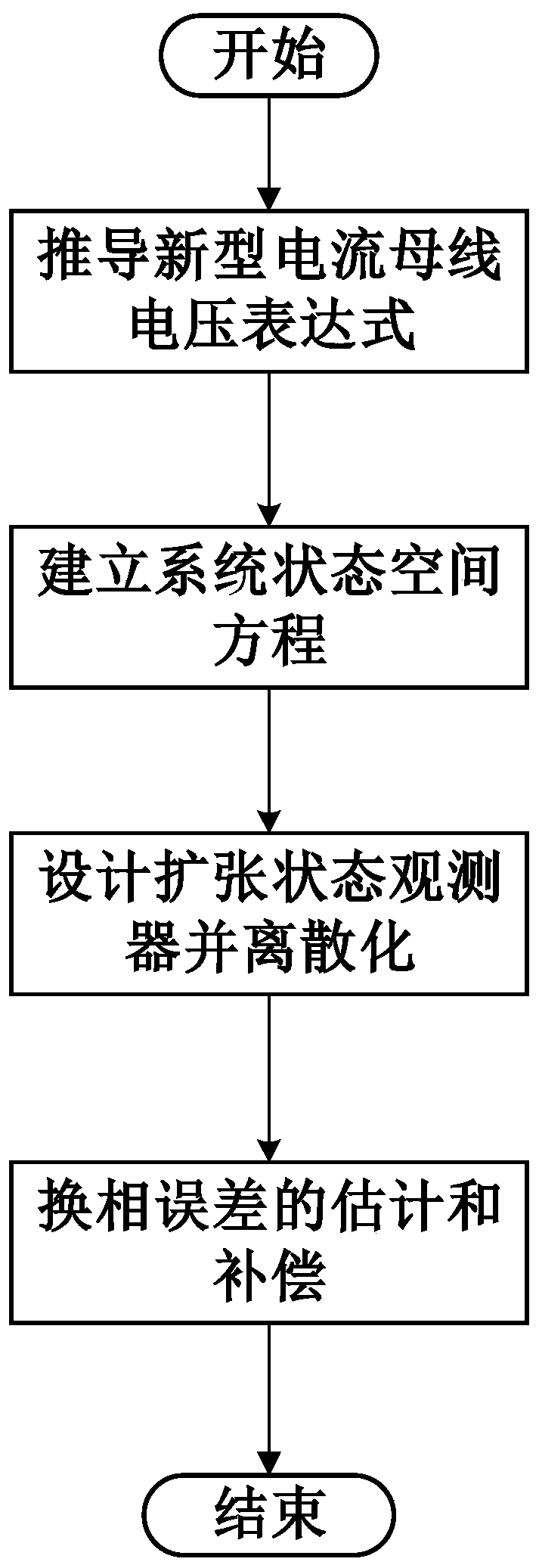
[0065] (1) Deriving a new DC bus voltage expression with commutation error information
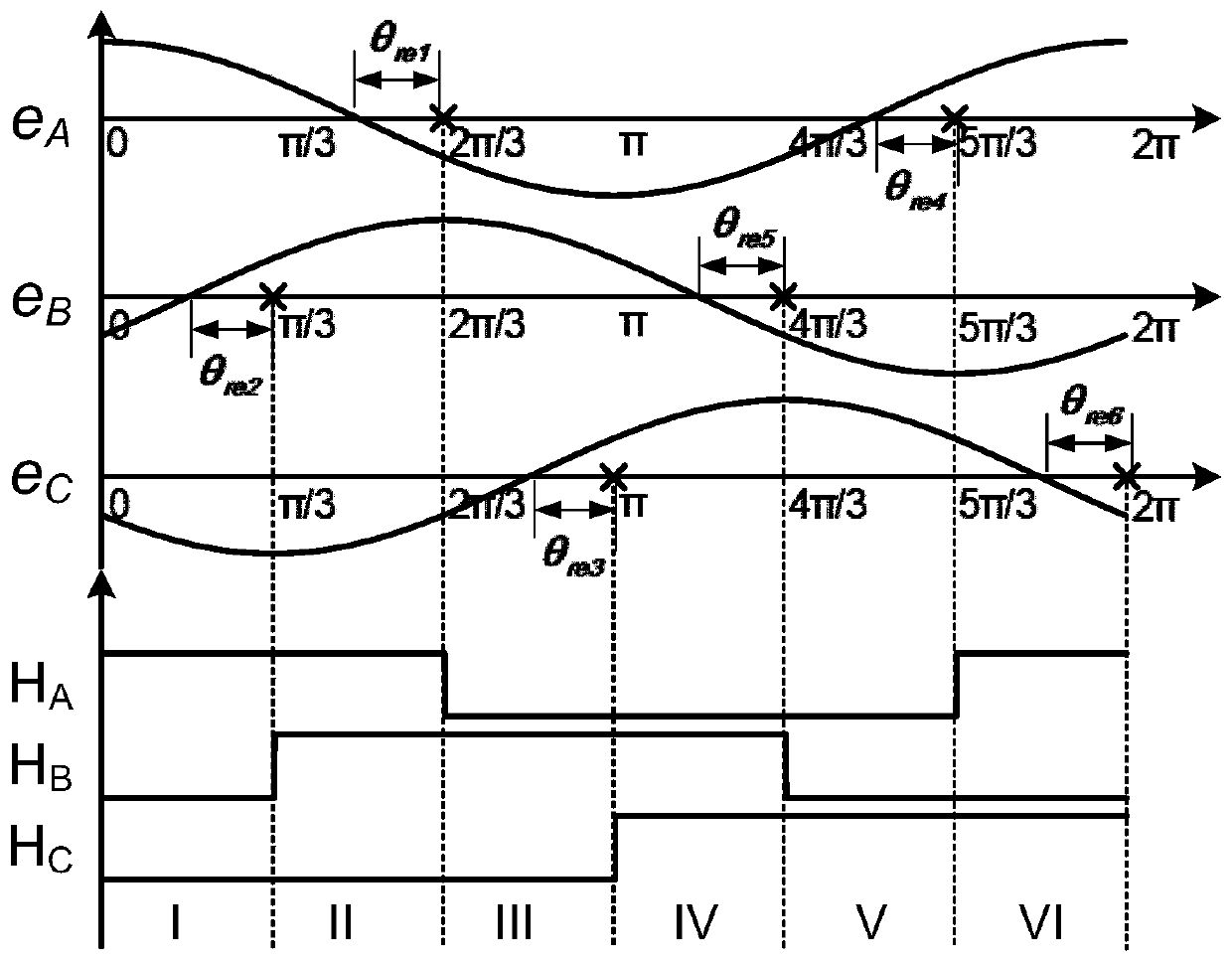
[0066] The expression of the Fourier series form of the phase back electromotive force of the maglev control torque gyro brushless DC motor is established as follows:
[0067]
[0068] Among them, e A 、e B and e C are the voltages of the three opposite electromotive forces, K e is the back EMF coefficient, ω e is the electrical angular velocity of the motor, ω r is the mechanical angular velocity of the motor, A n is the amplitude of the nth harmonic.
[0069] Taking the conversion from phase B to phase C as an example, the expression for establishing the DC bus voltage is:
[0070]
[0071] where u m is the DC bus voltage output by the buck converter, i m is the DC bus current, R m is the stator phase resistance, L m is the stator phase inductance.
[0072] According to the BLDC motor phase back electromotive force e A 、e B and e C The expression of and the DC bus vol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com