

A system and method for estimating the rotor position and speed of a permanent magnet synchronous motor
A permanent magnet synchronous motor and rotor position technology, applied in the estimation/correction of motor parameters, control systems, electronic commutators, etc., can solve problems such as the phase delay of the low-pass filter of the observer
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
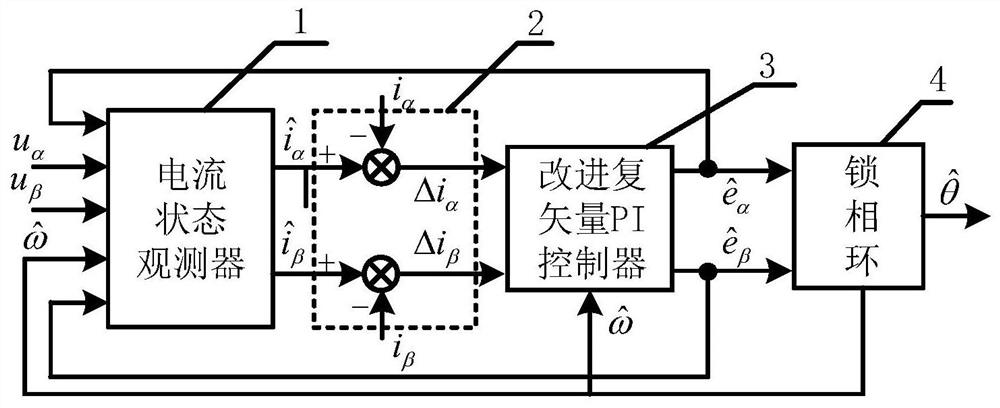
[0041] A permanent magnet synchronous motor rotor position and speed estimation system using an improved sliding mode observer, such as figure 1 As shown, the technical solutions adopted are as follows:
[0042] The system adopts a sliding mode observer, and the sliding mode observer includes a current state observer 1, a comparator 2, an improved complex vector PI controller 3 and a phase-locked loop 4; the signal output terminal of the current state observer 1 Be connected with the signal input end of described comparator 2; The signal output end of described comparator 2 is connected with the signal input end of described improved complex vector PI controller 3; The signal output end of described improved complex vector PI controller 3 It is connected with the signal input end of the phase-locked loop 4; the feedback signal output end of the improved complex vector PI controller 3 is connected with the feedback signal input end of the current state observer 1 . The input o...
Embodiment 2
[0057] A method for estimating the rotor position and speed of a permanent magnet synchronous motor using an improved sliding mode observer, the method for estimating the rotor position and speed of a permanent magnet synchronous motor includes:
[0058] Step 1: The voltages of the α and β axes of the permanent magnet synchronous motor are input into the current state observer, and the current observation values of the α and β axes are obtained through the processing of the current state observer
[0059] Step 2: The current observation values of the α and β axes The input is to the comparator, where the current observations of the α and β axes are combined by and the α and β axis current detection values of the α and β axes i α i β Compare and obtain the α and β axis current deviation Δi α , Δi β ;
[0060] Step 3: The α and β axis current deviation Δi α , Δi β Input into the improved complex vector PI controller; make the current deviation Δi α , Δi β Mult...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More