

Point cloud registration method for point neighborhood scale difference description
A technology of scale difference and point cloud registration, applied in the field of computer vision, can solve the problems of complex calculation, low calculation efficiency, and high latitude of SHOT operator
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
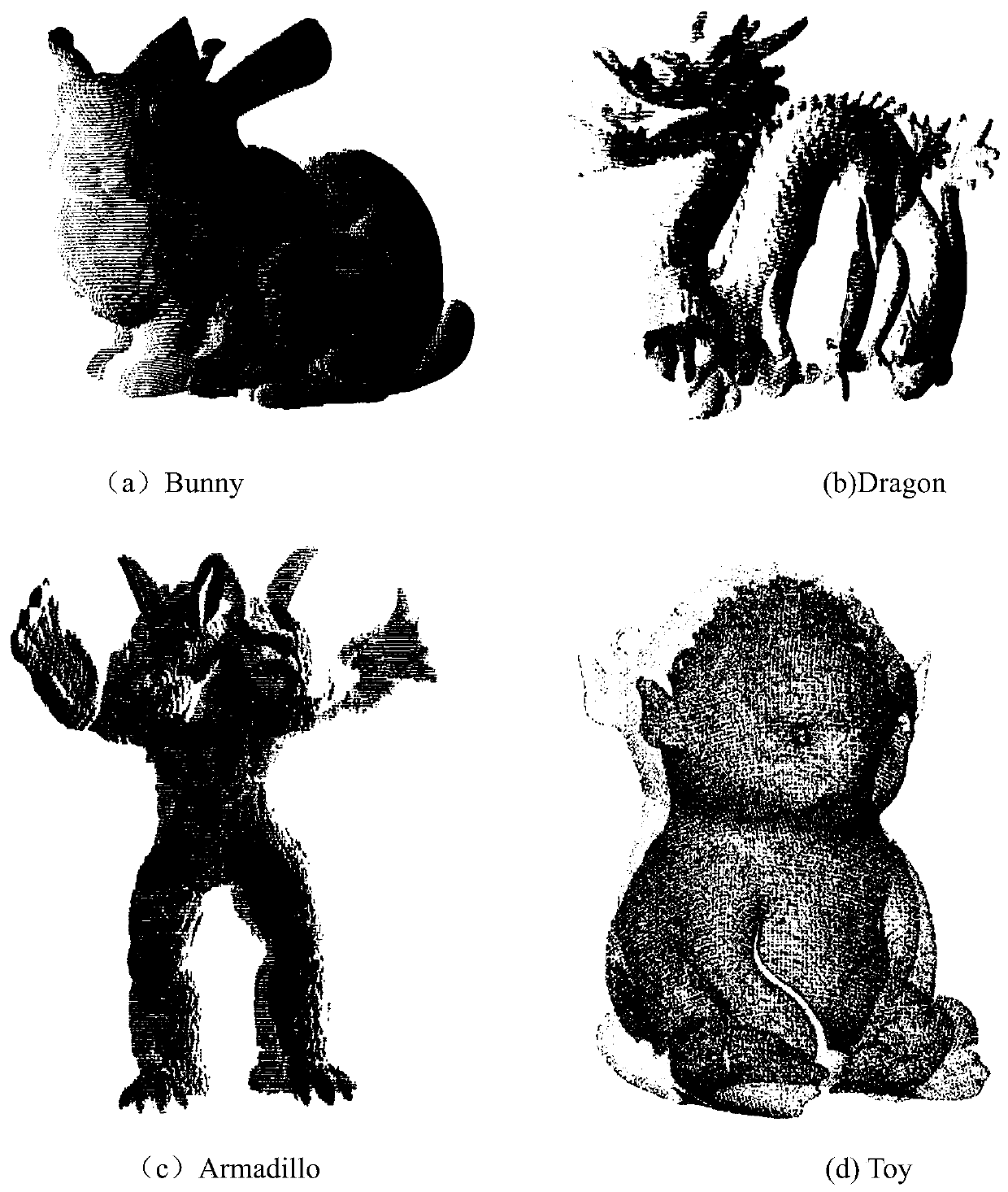
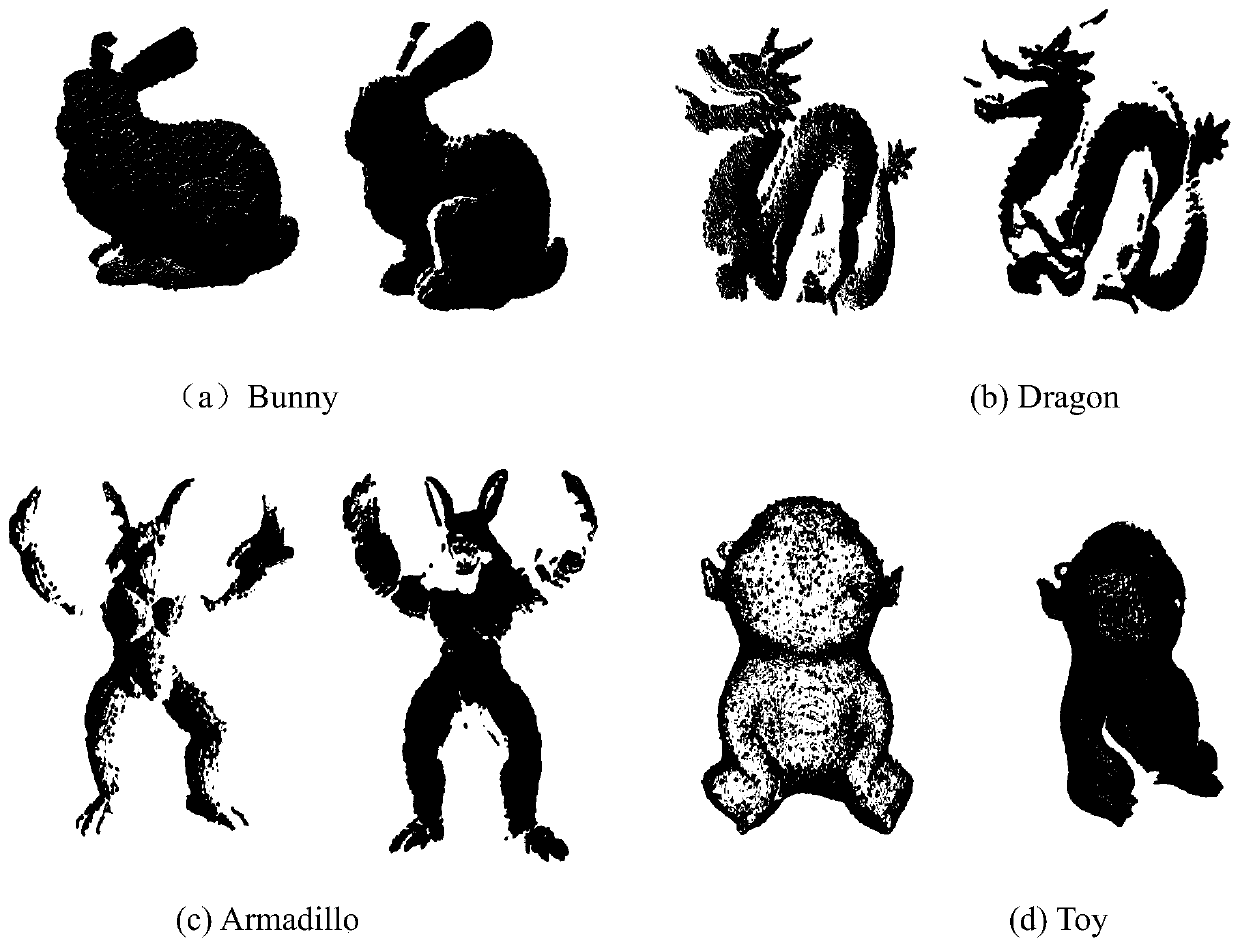
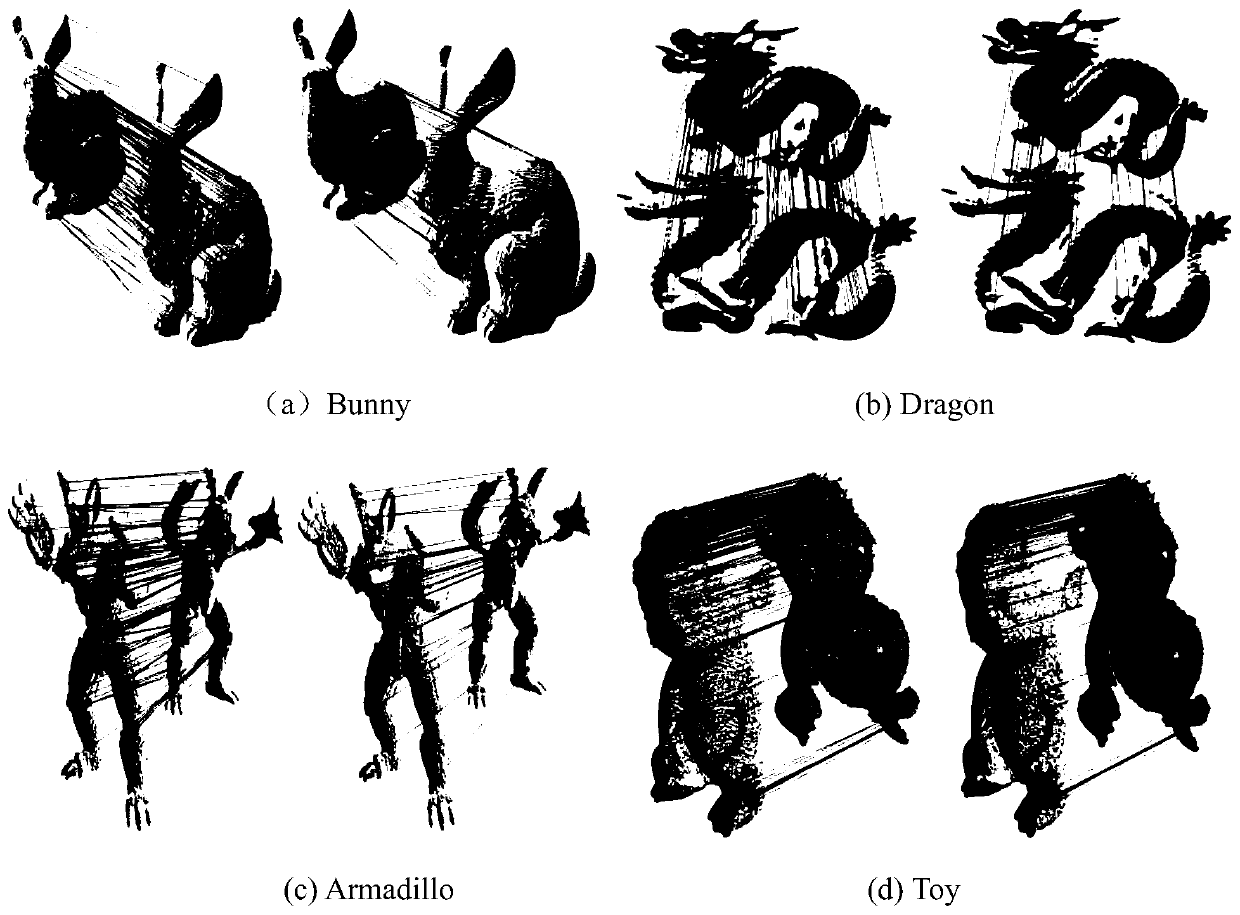
[0054] The point cloud used in the present invention is obtained from the point cloud model library of Stanford University and a self-developed structured light measuring instrument. Using four sets of point cloud data of Bunny, Dragon, Armadillo and Toy, the implementation is given and illustrated with the accompanying drawings. figure 1 is the initial position of the point cloud data, and the same set of point cloud data contains point cloud data from two perspectives.
[0055] Step 1. Find key points, use the least squares method to perform surface fitting on each point of the point cloud, and obtain the local surface z=r(u,v) of the neighborhood of discrete points. After obtaining the fitted quadratic parametric surface, the Gaussian curvature K and the average curvature H of the surface can be calculated from the first type of basic quantities E, F, G and the second type of basic quantities L, M, and N of the quadratic parametric surface :
[0056]
[0057]
[005...
Embodiment 2
[0090] The purpose of the invention is to disclose a point cloud registration method described by point neighborhood scale differences. First, the least squares surface fitting is performed on the discrete points in the source point cloud and the target point cloud to obtain the local surface, and the shape index SI of the surface is obtained, which is the shape index of the discrete point. The point whose shape index is the largest or smallest in the neighborhood and meets the threshold is selected as the key point of the point cloud. Secondly, the feature descriptor is constructed, and the feature normalized vector difference and normal vector angle difference of the key point under different neighborhood radii are calculated and combined into a point domain scale difference descriptor. Finally, according to the similarity of feature descriptors, the corresponding points are found, and the double screening and the optimal search algorithm based on the global distance are use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More