

Mapping and positioning method based on sensor information fusion
A positioning method and sensor technology, applied in the direction of instruments, electromagnetic wave reradiation, measuring devices, etc., can solve problems affecting robot obstacle avoidance, achieve detailed feature information, and improve positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
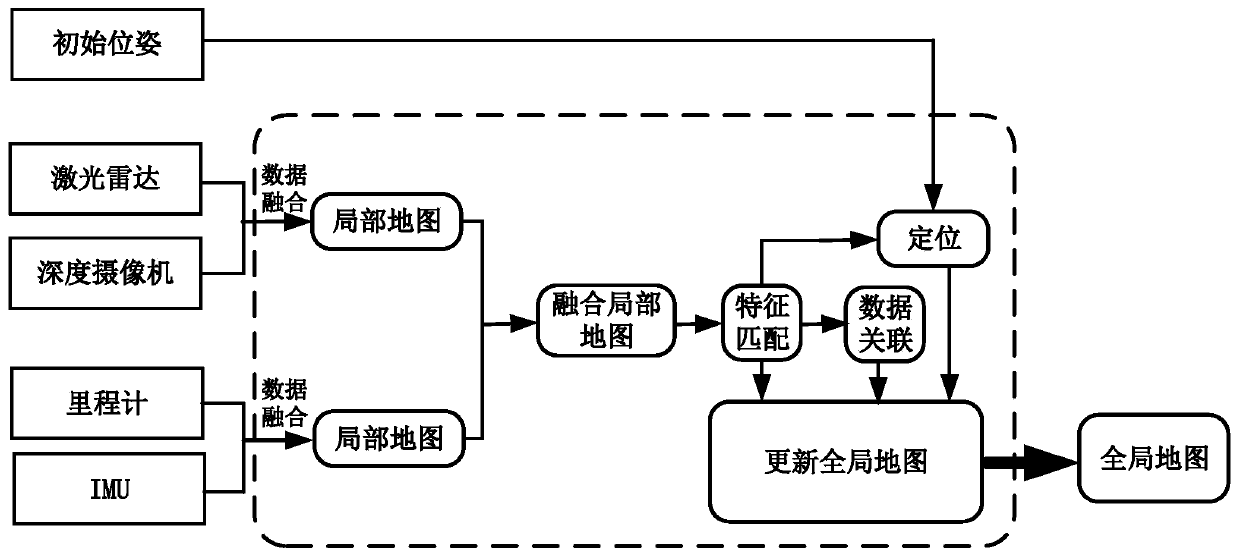
[0026] see figure 1 , the present invention provides the following technical solutions: a mapping and positioning method based on sensor information fusion, comprising the following steps:
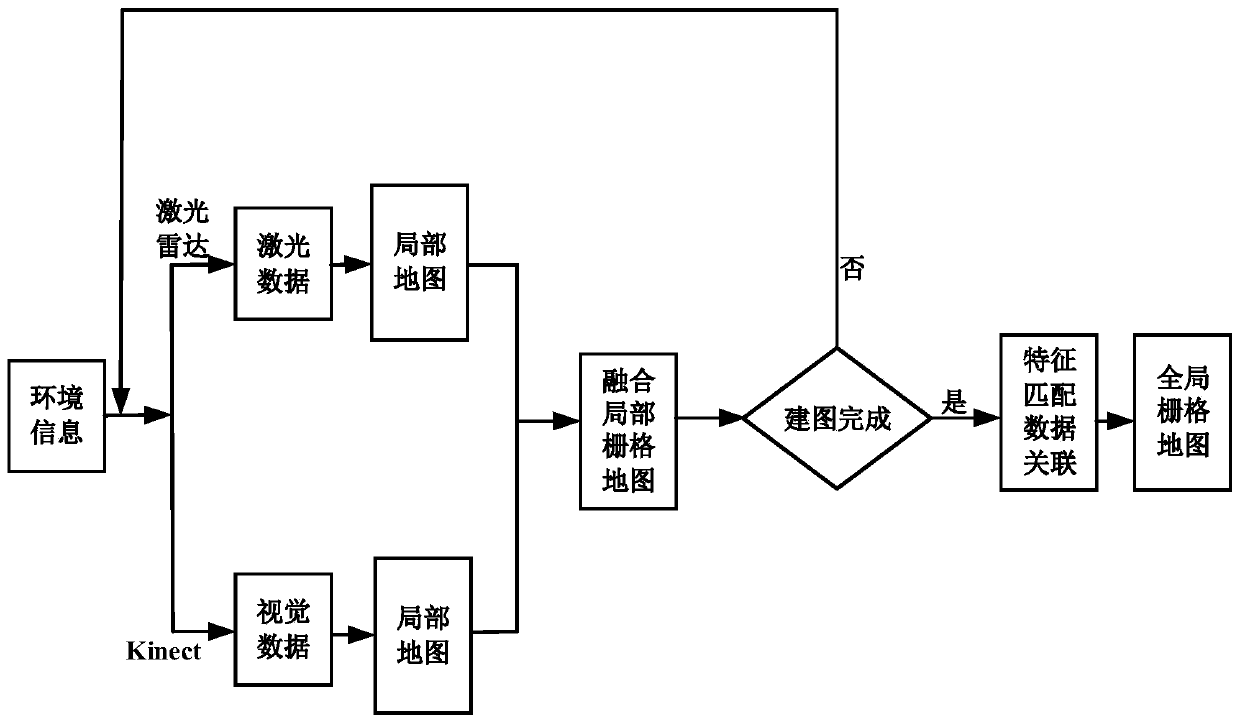
[0027] 1. At the initial moment, obtain the robot body and surrounding environment information through 2D lidar, depth camera Kinect, odometer, and inertial measurement unit IMU;
[0028] 2. Perform data processing such as filtering, marking, and encryption on the environmental information obtained in step A, and at the same time create a local map and perform feature matching to construct a global map at the initial moment;
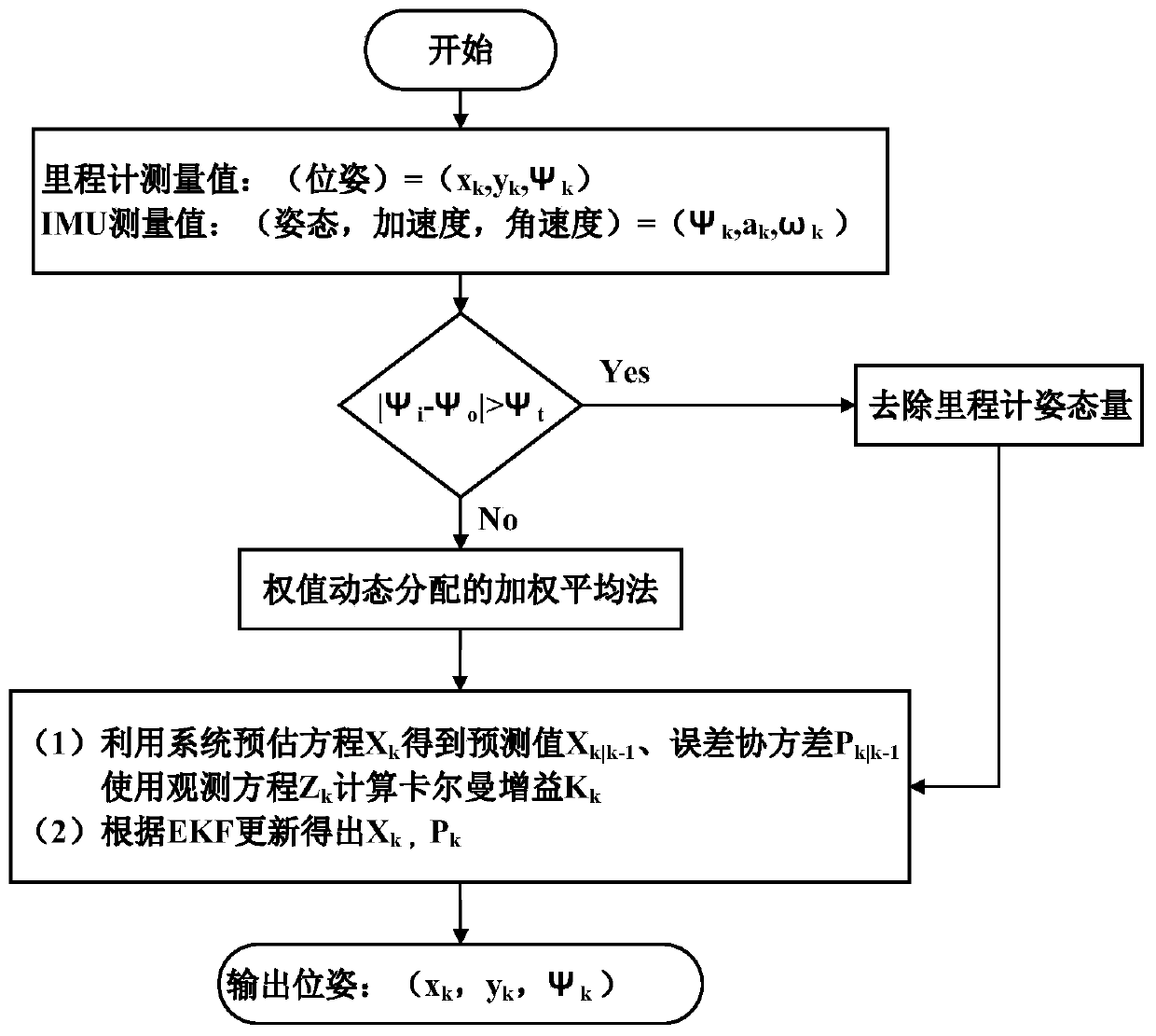
[0029] 3. After the robot moves, first use the Kalman filter algorithm to fuse the newly measured data of the odometer and IMU to generate new robot pose information; secondly, use the Bayesian algorithm to fuse the environmental features acquired by the depth camera and 2D lidar Get new environmental feature information; finally build a new local map based on the n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More