

Fuzzy adaptive sliding mode control method and system based on differential evolution algorithm optimization
A differential evolution algorithm and fuzzy self-adaptive technology, applied to control systems, vector control systems, control generators, etc., can solve problems such as the complexity of the design process, and achieve the effect of improving robustness and reducing chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
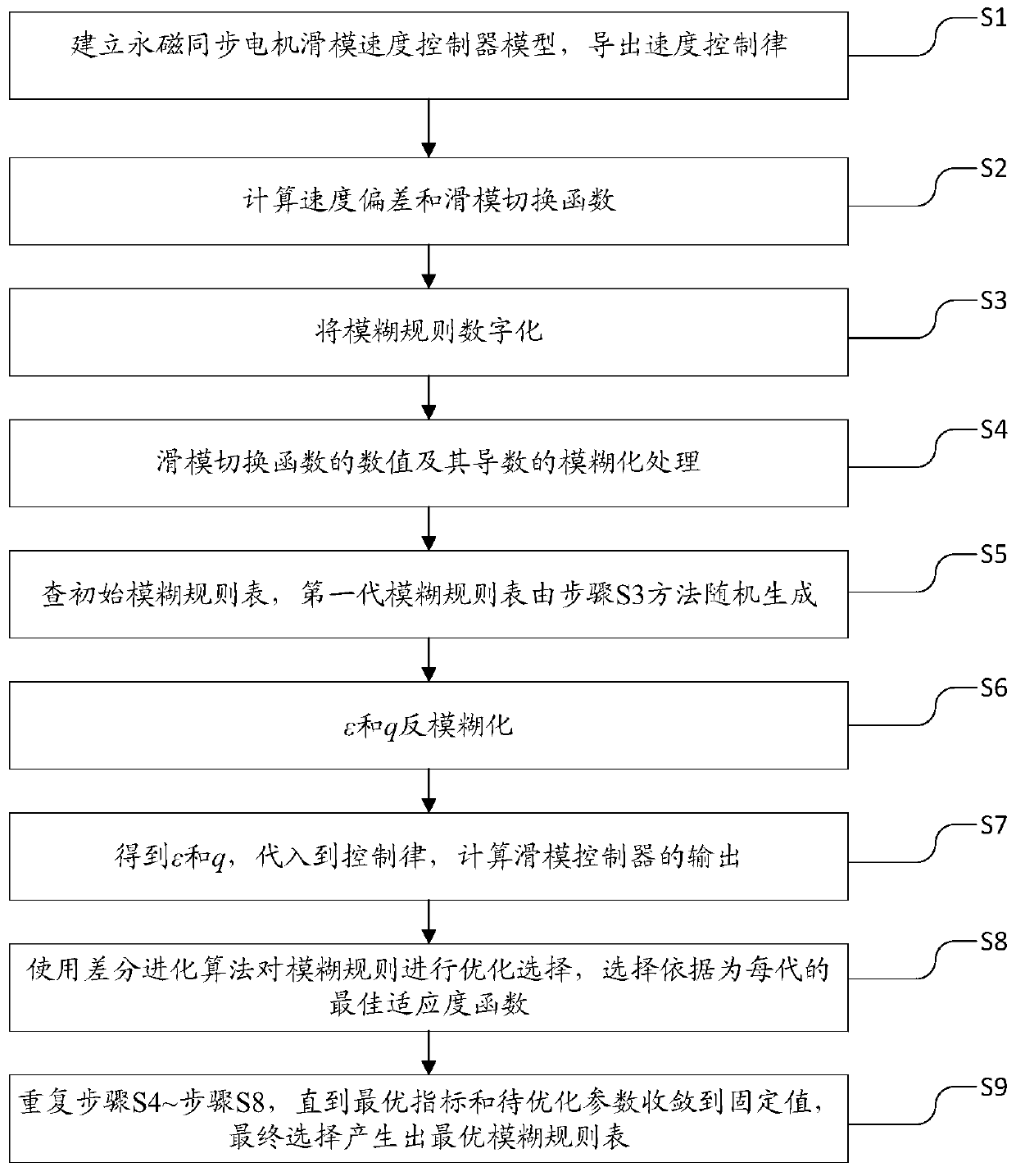
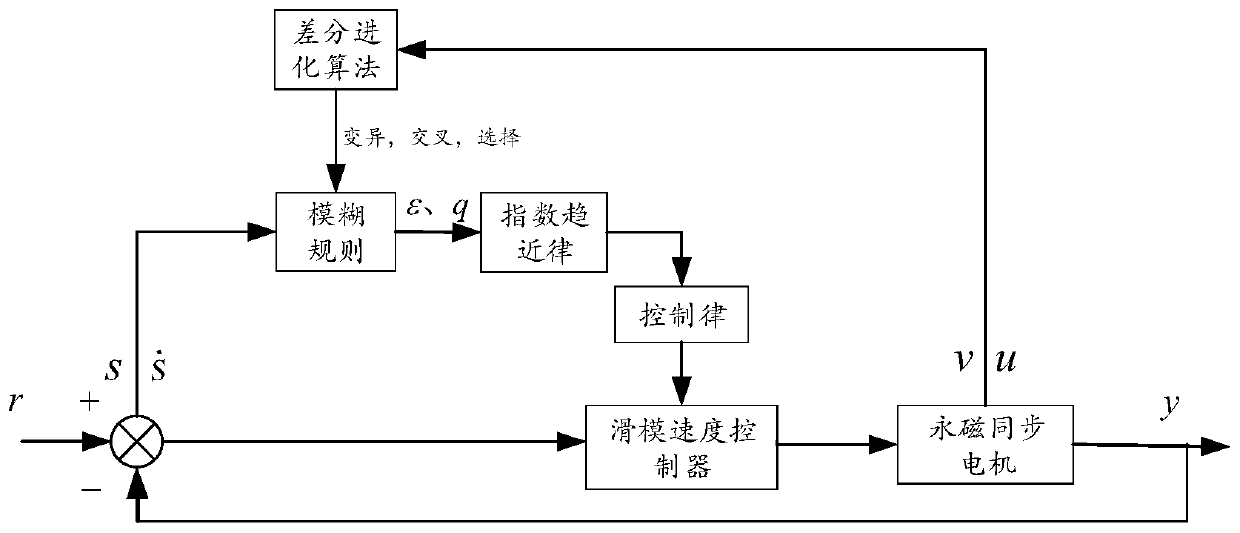
[0076] figure 1 and figure 2 They are respectively the step flow chart and schematic diagram of the fuzzy adaptive sliding mode control method based on differential evolution algorithm optimization provided in Embodiment 1 of the present application, and the described fuzzy adaptive sliding mode control method based on differential evolution algorithm optimization includes the following steps :
[0077] Step S1, establishing the sliding mode speed controller model of the permanent magnet synchronous motor, and deriving the speed control law;
[0078] use i d = 0 rotor field oriented control method, i d Indicates the DC current of the permanent magnet synchronous motor. In order to ensure that the three-phase PMSM drive system has better dynamic quality, the exponential reaching law method is used to obtain the control law of the sliding mode speed controller of the permanent magnet synchronous motor as follows:
[0079]
[0080] In formula (1), D is the motor paramete...
Embodiment 2
[0117] Based on the method in Embodiment 1, this embodiment provides a fuzzy adaptive sliding mode control system optimized based on differential evolution algorithm.
[0118] Figure 9 It is a schematic structural diagram of the fuzzy adaptive sliding mode control system optimized based on the differential evolution algorithm provided in this embodiment. The fuzzy adaptive sliding mode control system optimized based on the differential evolution algorithm includes a PMSM module, a coordinate transformation module, and a differential evolution algorithm. Algorithm-optimized fuzzy sliding mode controller, torque current regulator, excitation current regulator, SVPWM module, three-phase inverter, sensor module, etc.
[0119] combine Figure 10 ,in,
[0120] Permanent magnet synchronous motor PMSM, used to output three-phase winding current i a i b i c ;
[0121] A coordinate transformation module, including a Clark transformation module, a Park transformation module and a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More