

Air floatation robot device capable of working for long time and method
A robot and air flotation technology, applied in the field of control, can solve the problems of inability to carry out scientific experiments, precision cannot be guaranteed, and small range of motion, etc., to achieve the effect of convenient scientific experiments, convenient practical application, and large range of motion due to load-bearing difference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
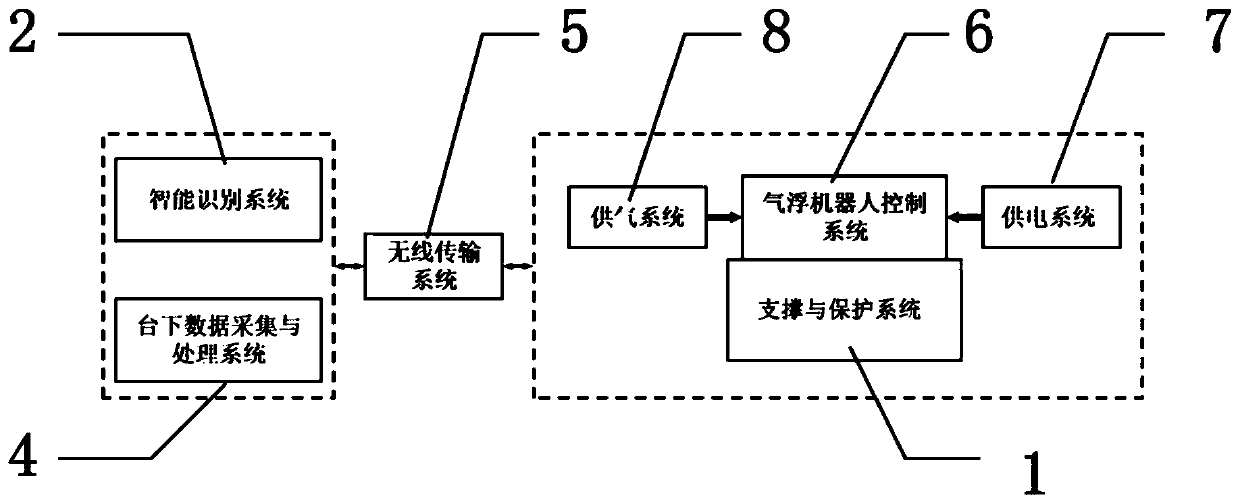
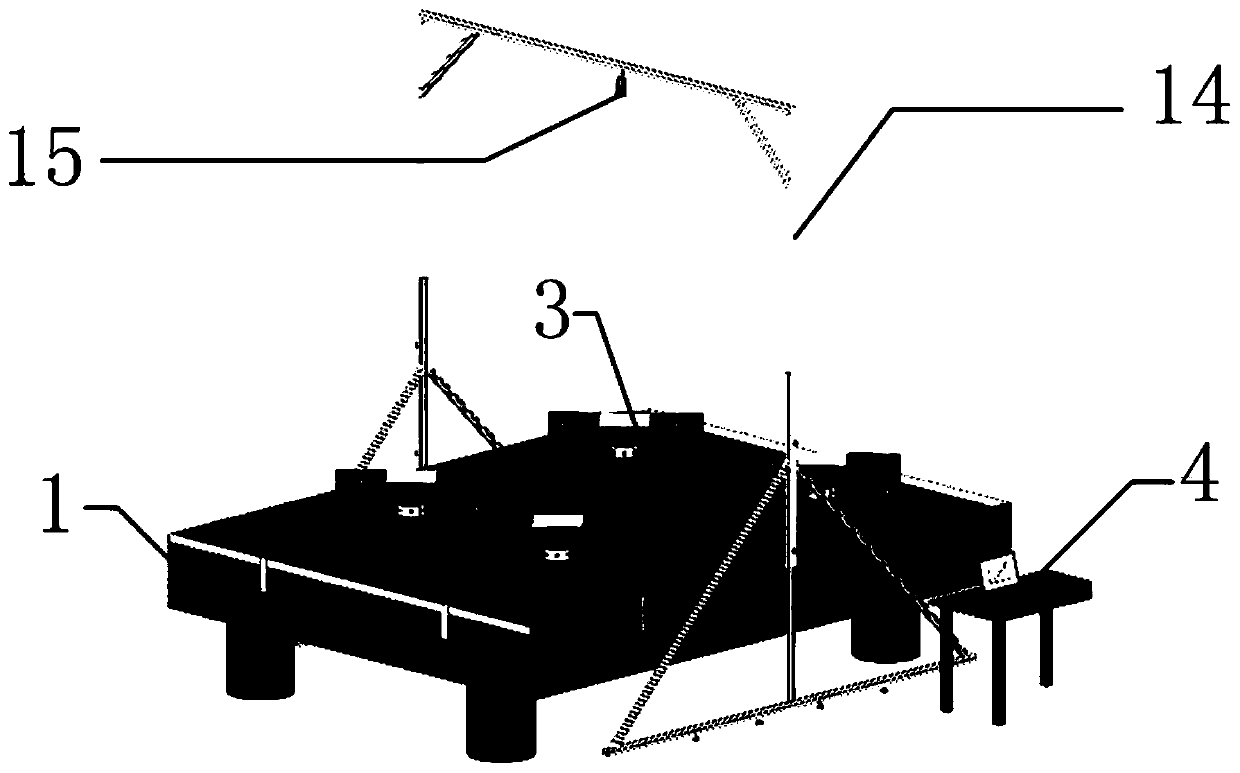
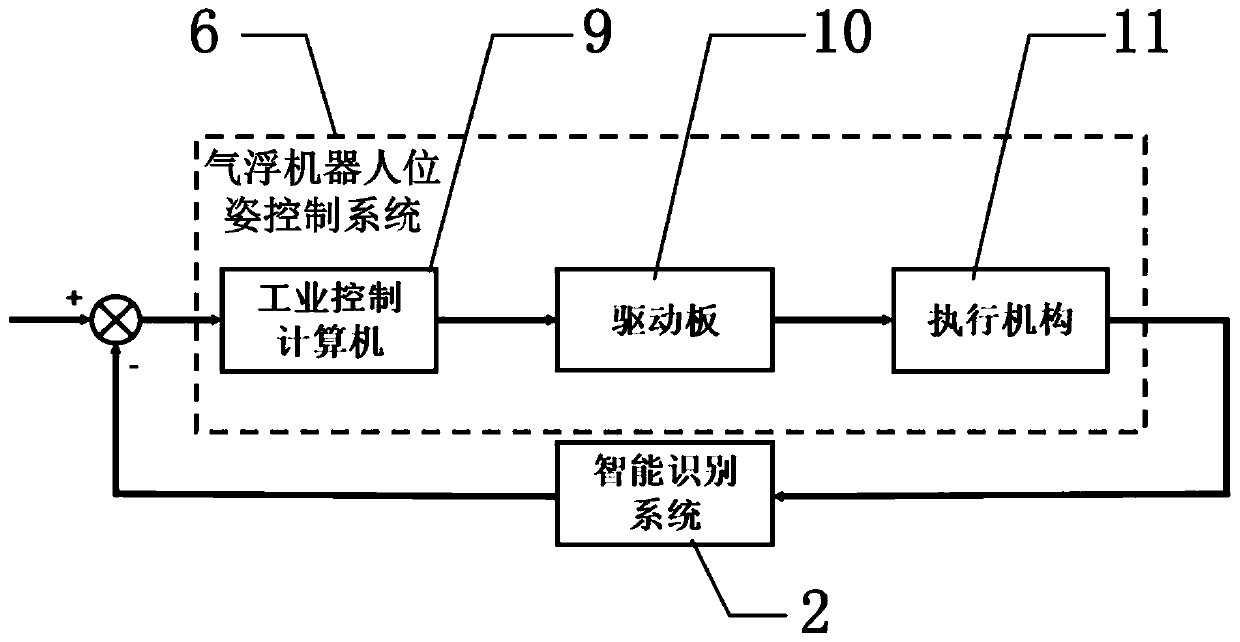
[0071] The position and posture control device of the air-floating robot is mainly composed of a support and protection system 1, an intelligent identification system 2, an off-stage data acquisition and processing system 4, a wireless transmission system 5, an air-floating robot position and posture control system 6, a power supply system 7 and an air supply system 8 composition composition such as figure 1 , figure 2 shown. figure 2 Among them, 1 is the support and protection system, 2 is the intelligent identification system, 3 is the air-floating robot, and the air-floating robot includes the air-floating robot control system, air supply system, and power supply system, and 4 is the off-stage data acquisition and processing system. The robot adopts the shape of the actual satellite, which is more realistic. The closed-loop control diagram of the system is as follows: image 3 shown.
[0072] The pose control system 6 of the air-floating robot is composed of an industr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More