

Dual laser type robot joint angle measuring method and angle measuring device
An angle measurement device, a technology of robot joints, applied in the direction of measurement devices, optical devices, instruments, etc., can solve the problem of inability to guarantee the requirements of robot joint posture measurement, inability to adapt to production application scenarios, insufficient dynamic range, etc., to reduce errors. , low price, reliable measurement effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
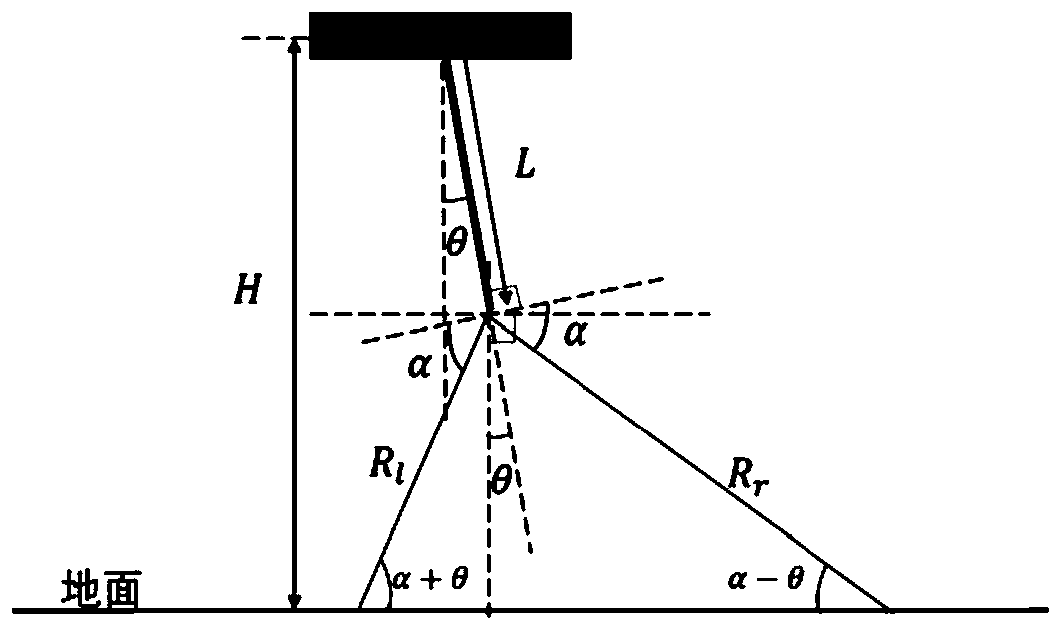
[0054]This embodiment provides a method for measuring the joint angle of a dual laser robot. The method uses the ground plane as a reference plane to construct a laser-plane angle measurement model, and converts the geometric relationship between the laser ranging and the joint rotation angle to convert the joint rotation The angle change is converted into the laser ranging change. During real-time measurement, the rotation angle of the robot joint is obtained by measuring the dual laser ranging change value at the robot joint and the laser-plane angle measurement model. The method includes the following steps:
[0055] 1) Install a dual laser rangefinder on the robot, the dual laser rangefinder includes two dual lasers, the angle between the outgoing laser of the laser and the vertical direction of the arm axis is set according to the measurement requirements;
[0056] 2) Collect the left and right laser ranging values of the dual laser rangefinder in real time during the j...
Embodiment 2
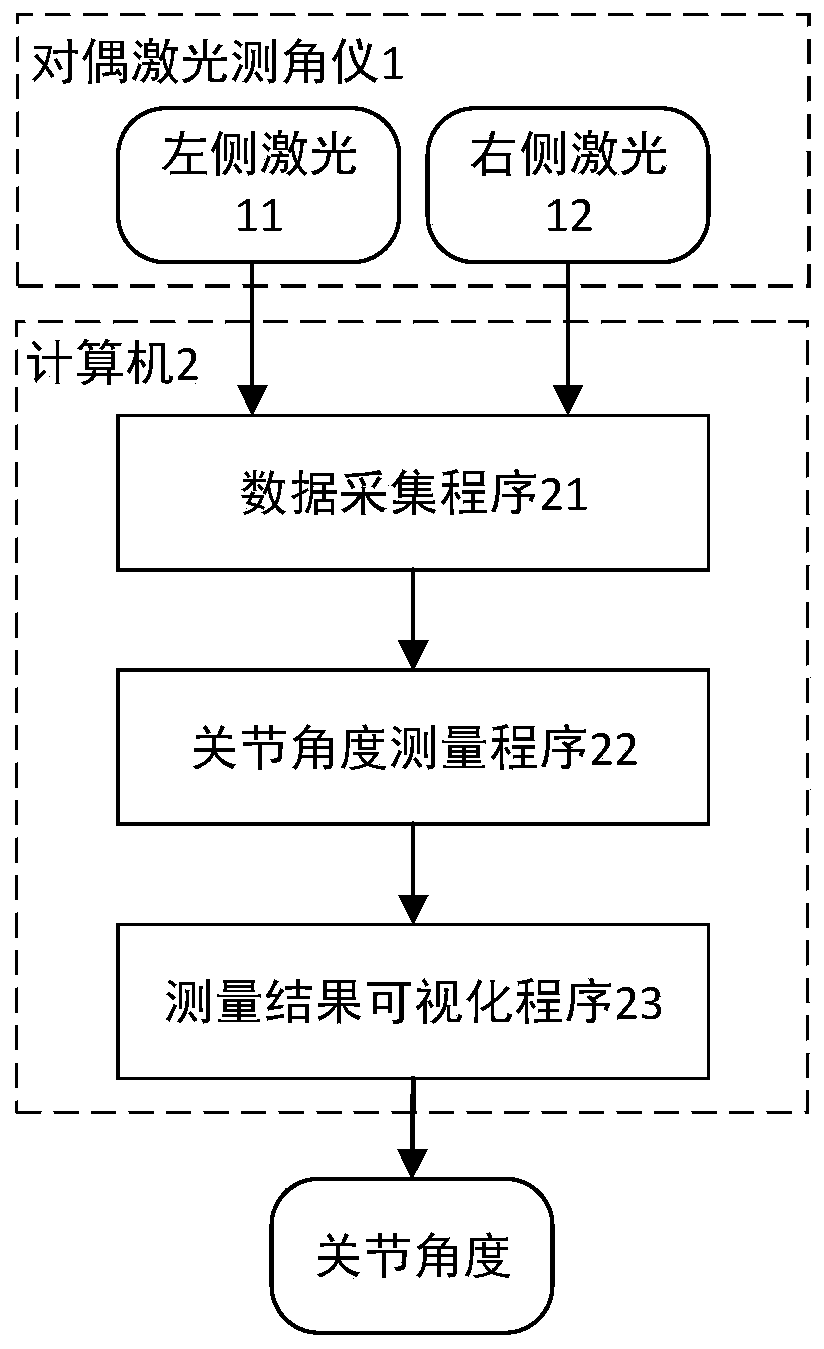
[0087] Such as figure 1 As shown, this implementation provides a dual laser robot joint angle measuring device, including a dual laser range finder 1 and a computer 2, wherein the dual laser range finder 1 is installed on the robot, and its central axis is in line with the arm axis of the robot Parallel; the computer 2 is connected with the dual laser rangefinder, and collects the left and right laser rangefinder values of the dual laser rangefinder in real time during the movement of the robot joint, and obtains the rotation angle of the robot joint based on the laser-plane angle measurement model. The measuring principle of the angle measuring device is as in embodiment 1.
[0088] The dual laser rangefinder 1 can be installed in the axial direction of the mechanical arm, such as at the end of the robot or on the side of the mechanical arm, as long as it is parallel to the direction of motion.
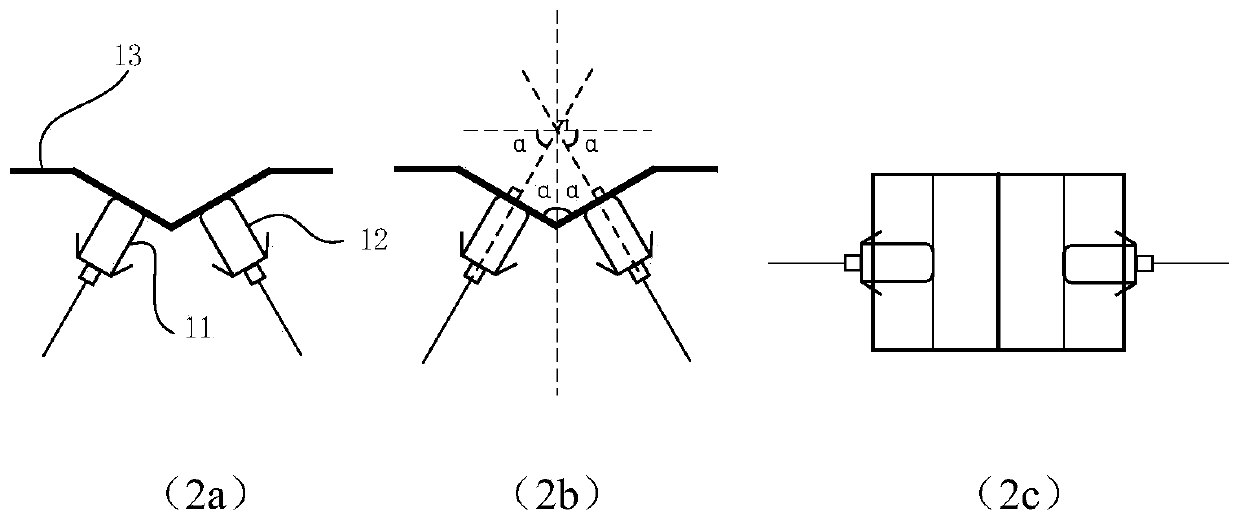
[0089] Such as figure 2 As shown, the dual laser rangefinder includes a V-s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More