

Intelligent long-arm disinfection robot based on vision system
A vision system and robot technology, applied in the field of intelligent long-arm disinfection robots, can solve the problems of unsuitable outdoor environment, reduced disinfection effect, single working environment, etc., and achieve the effect of curbing the spread of the epidemic, avoiding virus infection, and disinfecting a wide area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
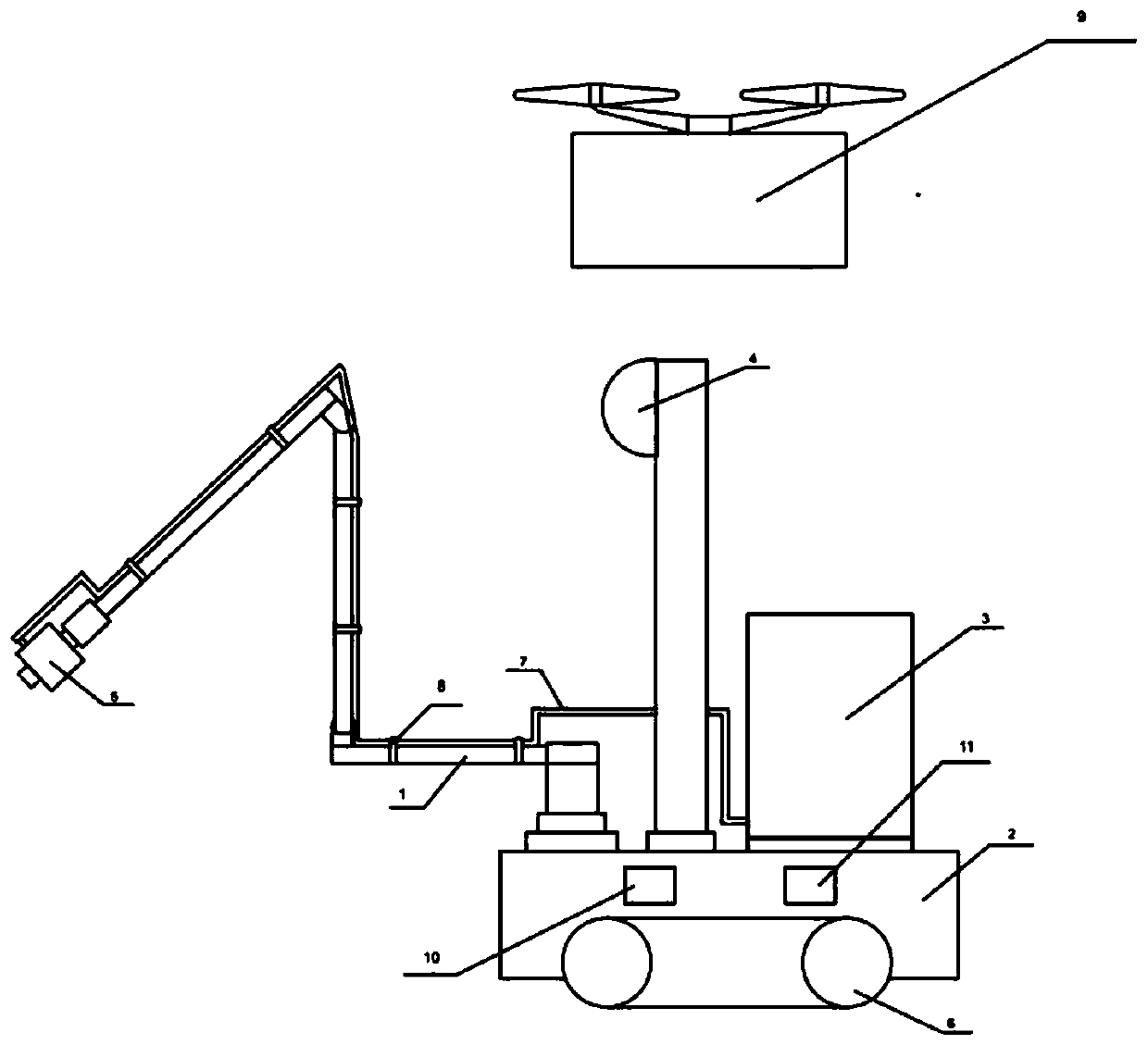
[0031] An intelligent long-arm disinfection robot based on vision system, such as figure 1 As shown, it includes a long-arm six-axis robot body 1, a base 2, a disinfectant storage tank 3, a vision device 4, a spraying device 5, a power supply device 10, and a main controller 11; the long-arm six-axis robot body 1, the vision device 4. The disinfectant storage tank 3 is respectively installed on the front end, the middle part, and the rear end of the base 2; The power supply unit 10 and the main controller 11 are arranged inside the base 2 .
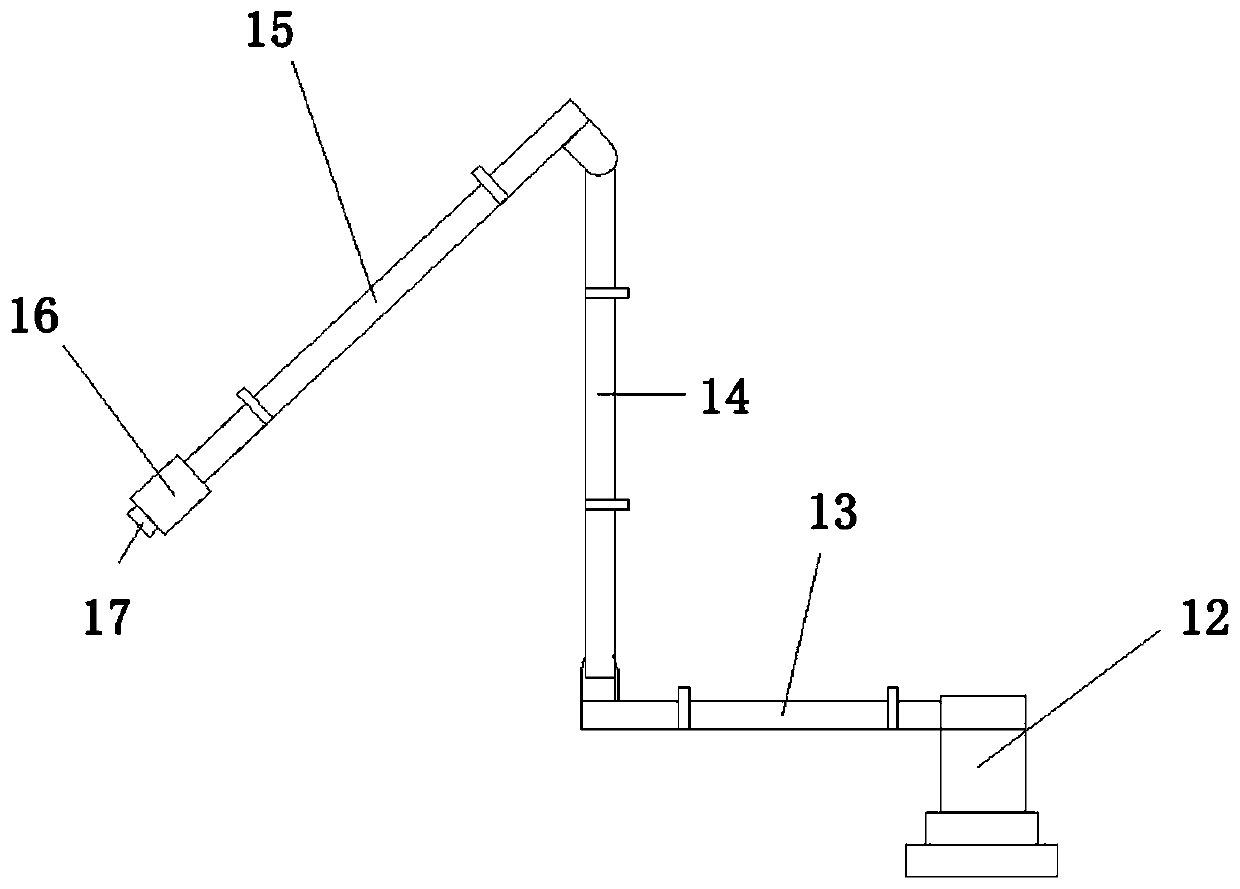
[0032] like figure 2As shown, the long-arm six-axis robot body 1 includes a one-axis base 12, a two-axis long arm 13, a three-axis long arm 14, a four-axis long arm 15, a five-axis joint 16, and a six-axis actuator 17, and sequentially The one-axis base 12 is fixed on the front end of the base 2; the air nozzle of the spraying device 5 is installed on the six-axis actuator 17. The arm length of the long-arm six-axis robot body 1 excee...
Embodiment 2
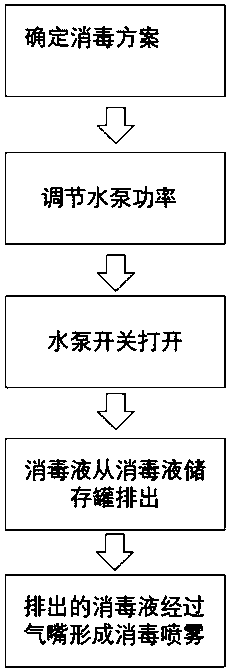
[0041] When the intelligent long-arm disinfection robot based on the vision system disinfects the canteen, such as image 3 As shown, the operation steps are as follows:
[0042] (1) The intelligent long-arm disinfection robot obtains the current position information of the robot through the positioning module; the distance information of the ground obstacles in the disinfection environment obtained by the infrared sensor and the proximity sensor provided outside the base 2; and the position information and distance information are fed back to the main controller 11;
[0043] (2) UAV 9 collects environmental information such as canteen tables and chairs, obstacles, walls, and ground through visual components and infrared sensors, and transmits the environmental information to the mapping module to establish image information of the disinfection environment space, and then transmits the image information to the main controller 11;
[0044] (3) The main controller 11 plans the...
Embodiment 3
[0050] In some special cases, the intelligent long-arm disinfection robot of the present invention, such as the indoor floor is low, the UAV cannot assist, the weather is bad, and the UAV cannot fly stably (such as basement, compartment floor, windy weather with uncertain wind direction) In this case, manual remote disinfection can also be used. The user controls the intelligent long-arm disinfection robot through the remote control. The intelligent long-arm disinfection robot receives remote control information through the wireless signal receiver, and feeds back information to the remote control through the wireless signal transmitter. The user controls the intelligent disinfection long-arm robot through the remote control. Traveling, the movement of the long-arm six-axis robot body and the spraying pressure of the spraying device. At the same time, the user can also understand the remaining battery level and disinfectant liquid level of the intelligent long-arm disinfection ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More