

Fused automatic driving automobile street-crossing pedestrian trajectory prediction method and system
An automatic driving and trajectory prediction technology, which is applied in the field of pedestrian trajectory prediction of autonomous vehicles crossing the street and pedestrian trajectory prediction of integrated autonomous vehicles crossing the street, which can solve the problems of reducing vehicle traffic efficiency, reducing road capacity, and poor pedestrian trajectory accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
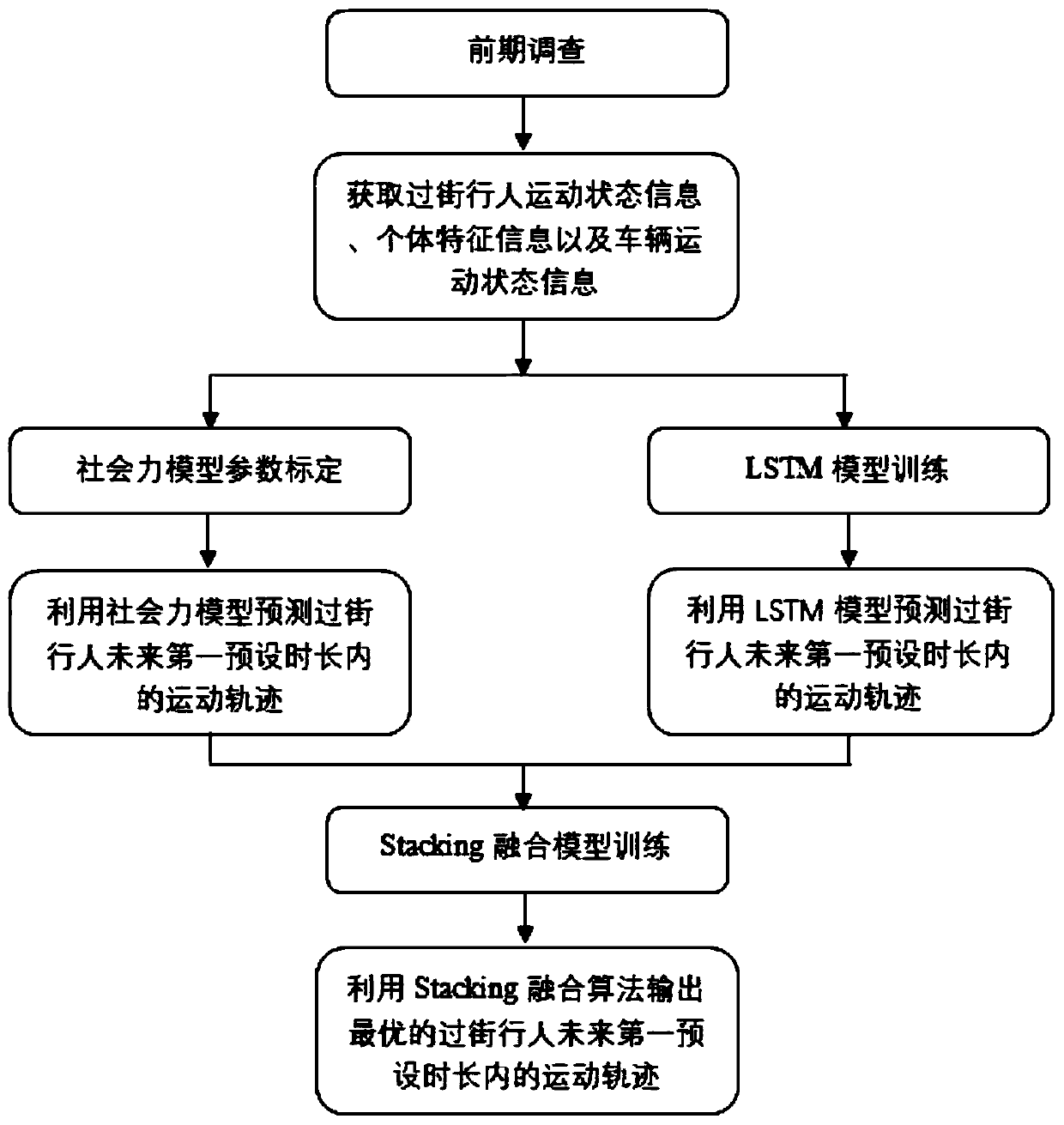
[0089] According to a kind of fused self-driving car crossing street pedestrian track prediction method provided by the present invention, comprise, such as figure 1 Shown:
[0090]Step M1: Obtain the motion state information of pedestrians crossing the street, individual feature information of pedestrians, and motion state information of autonomous vehicles within the range of the vehicle safety envelope through fusion algorithms based on on-board sensors;
[0091] Specifically, the step M1 includes: selecting pedestrians and vehicles in the zebra crossing area under free flow conditions for preliminary investigation, using self-driving cars equipped with laser, camera and / or millimeter-wave radar sensors, through multiple sensor information fusion algorithms , to obtain the movement state information (position, speed) of pedestrians crossing the street within the range of the vehicle safety envelope, the individual characteristic information of pedestrians (age, gender) and ...
Embodiment 2
[0176] Embodiment 2 is a modification of embodiment 1
[0177] The designed LSTM model has a network structure with one hidden layer, multiple inputs and multiple outputs. The input layer features 11, which are the speed (X, Y direction), position (X, Y direction) and age of pedestrians crossing the street respectively. and gender, as well as the vehicle's speed (X, Y direction), position (X, Y direction) and vehicle type, the gating unit in the hidden layer uses the sigmoid activation function, the input and output unit uses the tanh activation function, and the number of nodes in the hidden layer is set is 256, the output information of the output layer is the movement trajectory (X, Y direction) of the pedestrian crossing the street in the first preset duration in the future;
[0178] The LSTM unit includes three control gates, namely the input gate, the forget gate and the output gate, which are used to control the relationship between the input, output and the internal st...
Embodiment 3
[0209] Embodiment 3 is a modification of embodiment 1 and / or embodiment 2
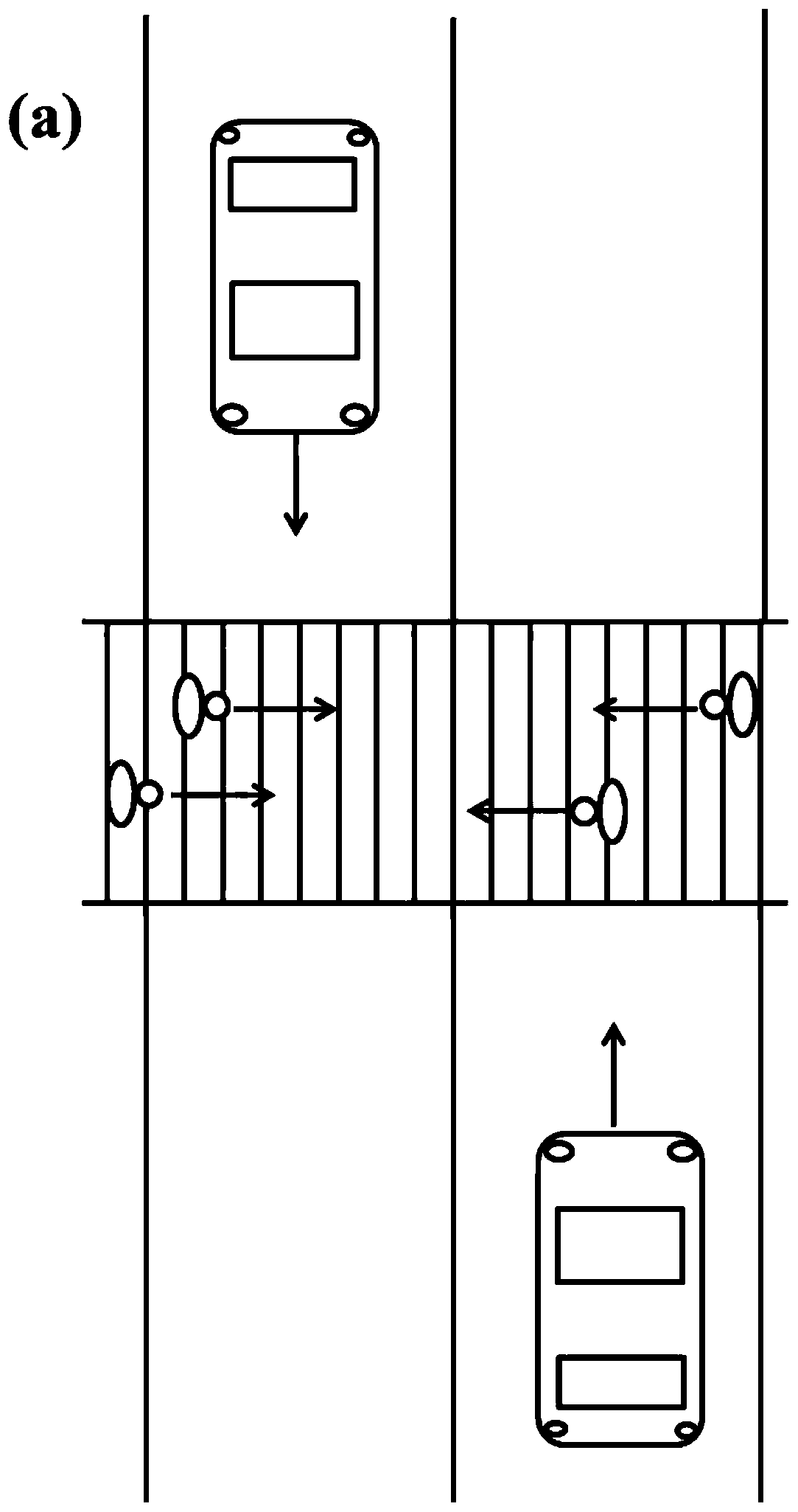
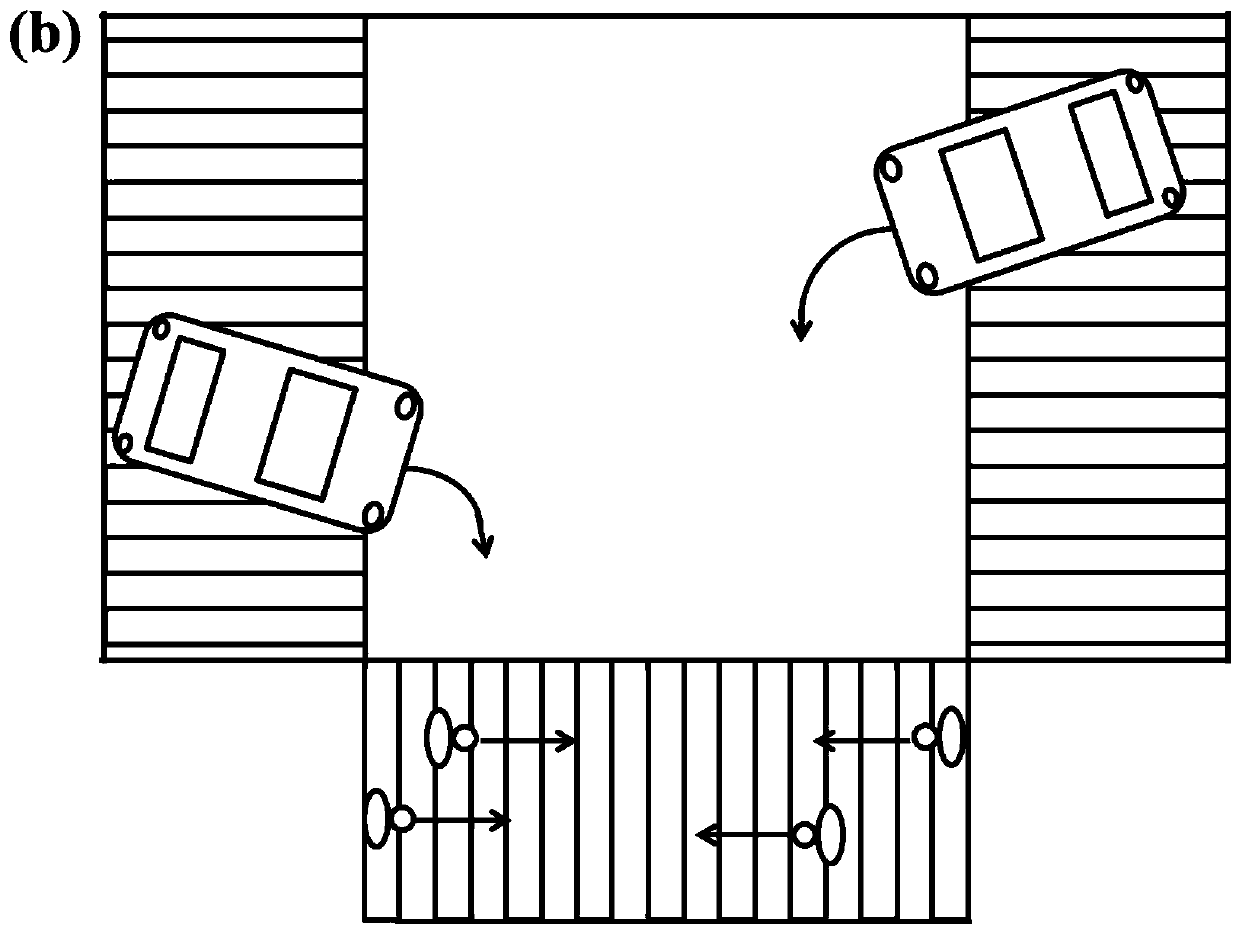
[0210] Such as figure 2 As shown, for a zebra crossing without signal light control, pedestrians crossing the street walk on the zebra crossing along the east-west direction, and autonomous vehicles go straight along the north-south direction. Integrate the social force model and LSTM model to predict the trajectory of pedestrians crossing the street for autonomous vehicles;
[0211] Select several typical zebra crossings without signal light control, including human-vehicle interaction scenes and different types of pedestrians, and collect more than 12 hours of traffic flow videos of pedestrians and vehicles crossing the street.
[0212] Through the preprocessing of the shooting video, the real trajectory of pedestrians crossing the street for a period of time can be obtained, and the same walking scene of pedestrians crossing the street is set, and a certain initial value of the parameters of the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More