

Filtering-based intelligent fault detection method for motors in industrial field
A fault detection and intelligent technology, applied in the direction of motor generator testing, measuring electricity, measuring devices, etc., can solve the problems of large amount of calculation, poor real-time performance, and difficult to describe statistical characteristics.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
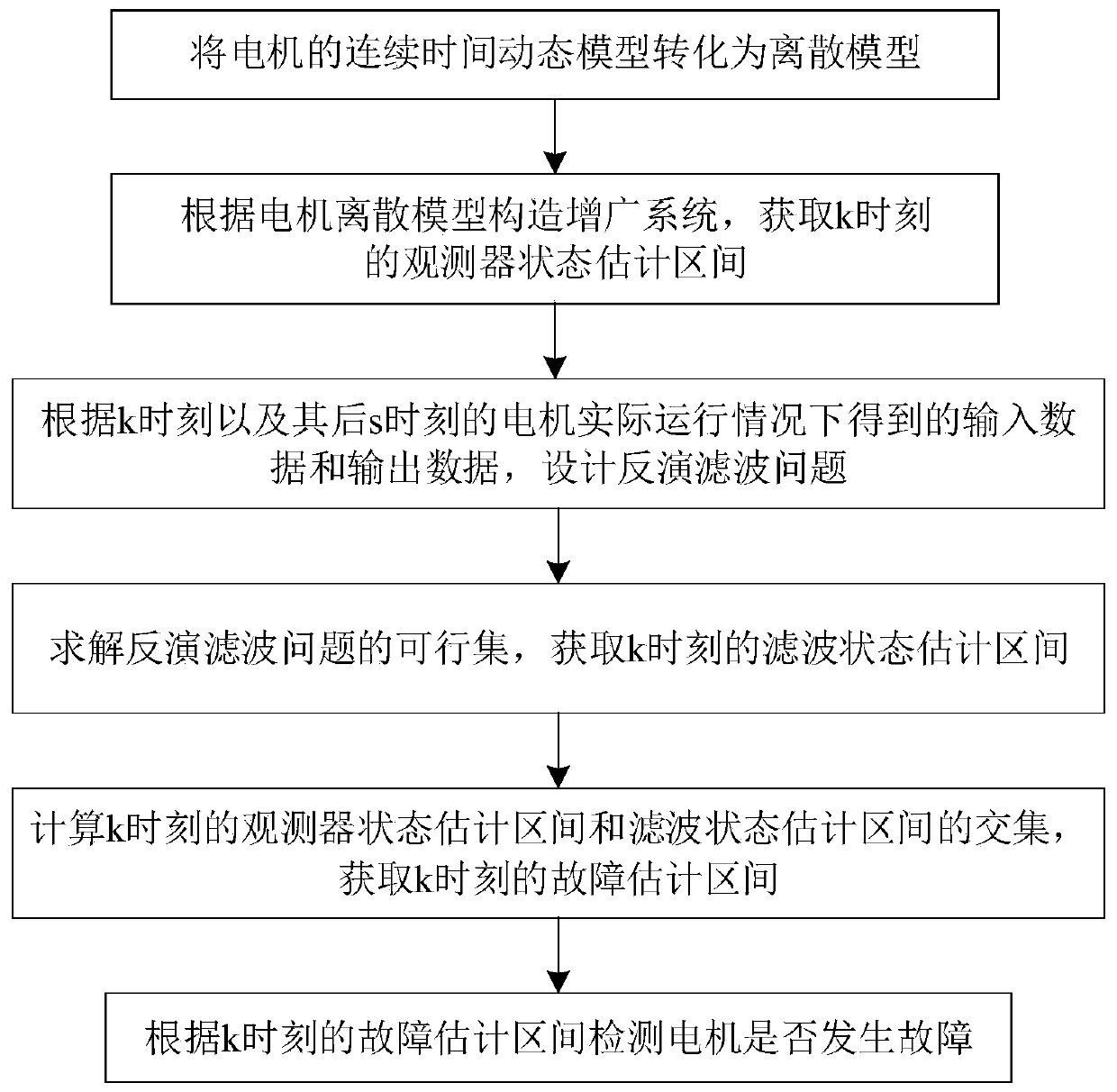
[0076] This embodiment provides a filter-based intelligent motor fault detection method in the industrial field, see figure 1 , the method includes:
[0077] Step 1: Establish a discrete model of the permanent magnet DC motor.
[0078] According to the working principle of the permanent magnet DC motor, the continuous time nonlinear dynamic model is obtained:
[0079]
[0080] Among them, u represents the armature voltage, K e Represents the counter electromotive force coefficient, n represents the motor speed, R a Represents resistance, i represents current, L 1 Indicates the inductance, K t Indicates the torque coefficient, T 0 and T 2 Represents the no-load torque and load torque respectively, J represents the moment of inertia of the rotor and the load, and Ω represents the angular velocity.
[0081] The no-load torque T produced by the losses of the motor 0 Equivalent to the friction in the bearings or the friction between the brushes and the commutator to prod...
Embodiment 2
[0138] This embodiment provides a filter-based intelligent motor fault detection system in the industrial field, using the intelligent fault detection method described in Embodiment 1 to detect faults on motors, specifically:
[0139] Use the MAX472 current sense amplifier to measure the armature current i when the permanent magnet DC motor is running, and the photoelectric encoder to measure the motor speed n.
[0140] Apply a DC voltage u to the motor, and measure the no-load speed n 0 , no-load current I 0 , no-load time constant T a and load speed n 2 , load current I 2 , the time t required for the armature current to reach 0.95 times the current of the motor in stable operation s , the parameters of the motor are obtained as follows:
[0141] Armature resistance R a for:
[0142]
[0143] Inductance L 1 for:
[0144]
[0145] Coefficient of counter electromotive force K e for:
[0146]
[0147] The viscous friction coefficient f of the motor bearing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More