

Legged robot for stable operation in amphibious environment
A robotic and stable technology, applied in amphibious vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of increased volume, weight, system complexity, instability of the body, and heavy motor load, and achieves reduced subsidence depth and use. The effect of long life and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the embodiments of the present invention. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
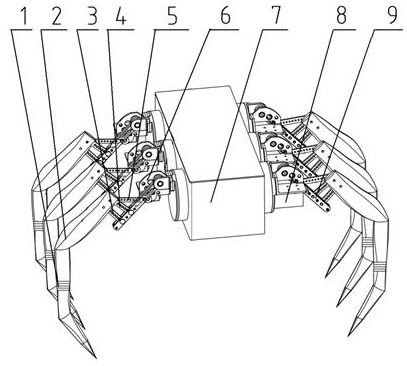
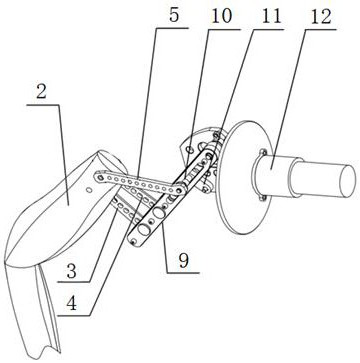
[0028] The legged robot that works stably under the amphibious environment of the embodiment of the present invention, such as Figure 1-2 As shown, it includes a sealed body 7, the body 7 is a waterproof airtight cabin, and the motor 12 is installed in the airtight cabin, which is convenient to work in an amphibious environment. The output shaft is fixedly connected to one end of the crank 11 through the bevel gearbox 8, and the other end of the crank 11 is connected to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More