

Part position error compensation method and system applied to field of robot spraying
An error compensation and robot technology, applied in the direction of the injection device, can solve problems such as position and attitude errors, and achieve the effect of high position accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings, but the present invention is not limited in any way, and any transformation made based on the teaching of the present invention falls within the protection scope of the present invention.
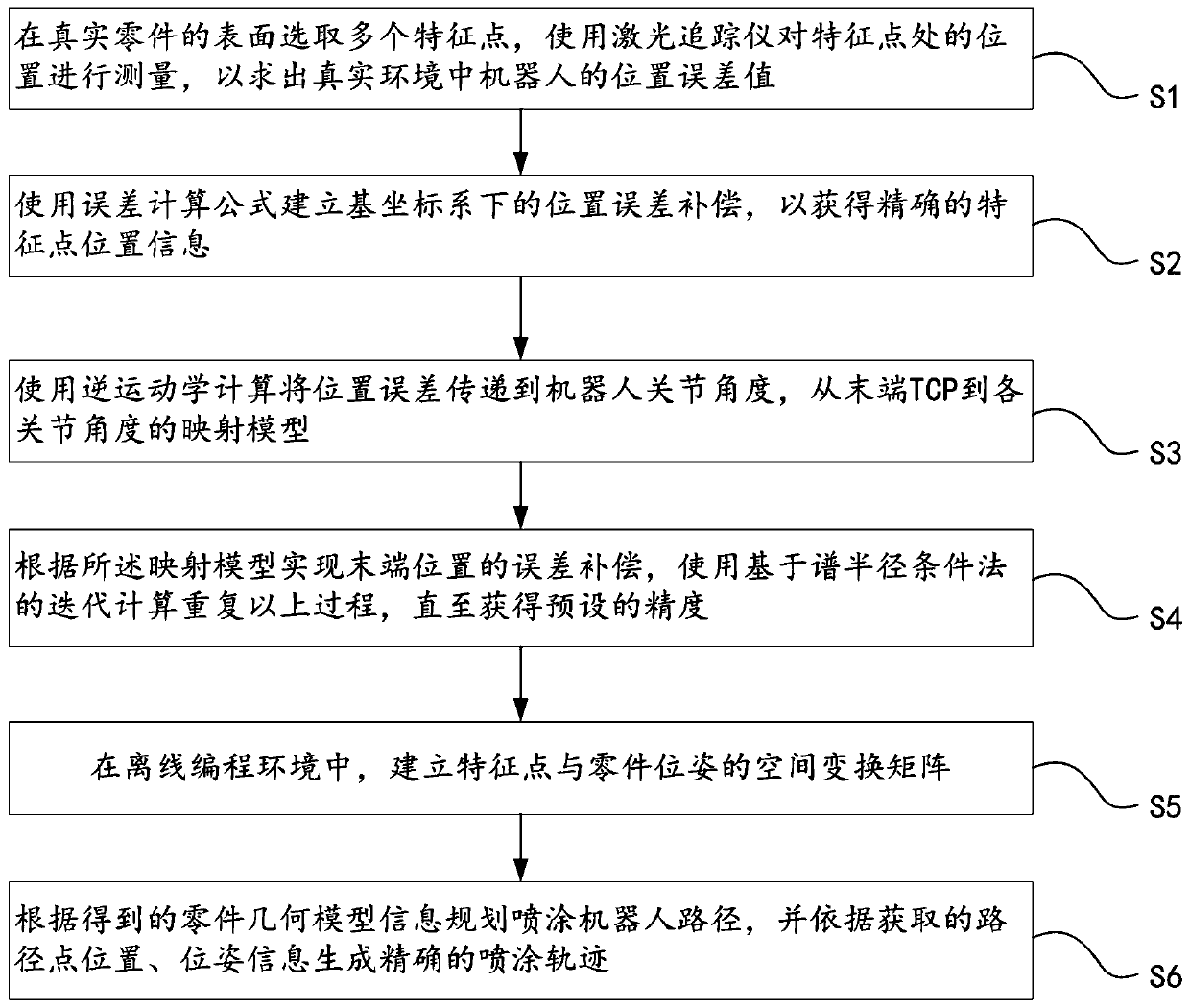
[0025] Please refer to figure 1 As shown, it is a flow chart of a preferred embodiment of a part position error compensation method applied in the field of robot spraying according to the present invention.
[0026] A preferred implementation of the method for compensating part position errors in the field of robot spraying includes the following steps:
[0027] Step S1: Select multiple feature points on the surface of the part in the real workshop, and use the laser tracker to measure the position of the feature points to find the position error value of the robot in the real environment.
[0028] Step S2: Use the following error calculation formula to establish position error compe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More