

High-efficiency wireless charging smart car with laser navigation function and control method based on ros
A wireless charging and laser navigation technology, applied in two-dimensional position/channel control, non-electric variable control, battery/fuel cell control devices, etc., can solve problems such as low efficiency conversion, abnormal operation of smart cars, service interruption, etc. , to achieve the effect of improving the level of automation, making up for common low efficiency, and reducing production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
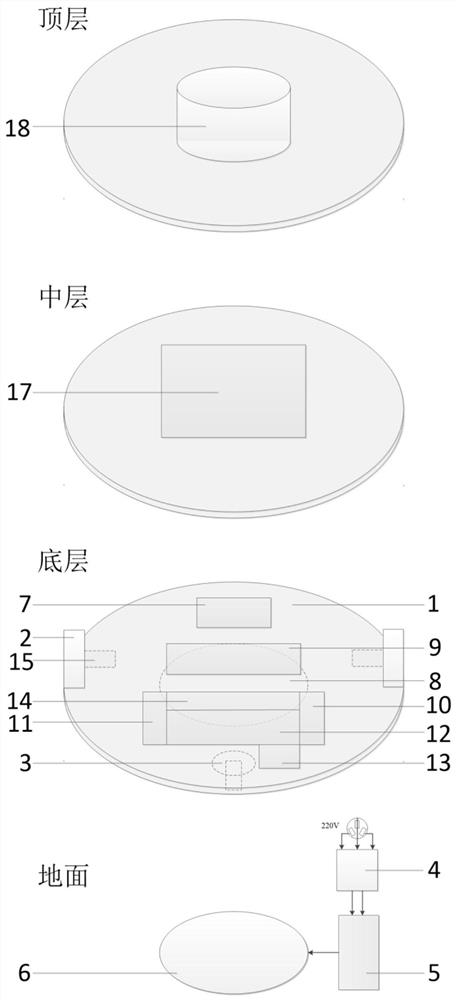
[0098] like figure 1 As shown, the overall structure of a wireless charging smart car with laser navigation function based on ROS system includes aluminum alloy disc*3, driving wheel*2, universal wheel*1, JGA25-370 motor*2, wireless charging module, 12V lithium battery pack, power conversion module, power supply voltage detection module, STM32 processor system, OLED display, TB6612 motor driver module, lidar, Raspberry Pi 3B+, host computer.
[0099] Specifically, the STM32 processor system, power conversion module, OLED display, motor drive module, motor, drive wheel and universal wheel, lithium battery pack, wireless charging module, and power supply voltage detection module are all installed on the lower chassis. The receiving coil generates current by inducting the sending coil set at the charging point. The wireless charging circuit with the XKT-801 chip as the core is used to charge the lithium battery pack through the receiving circuit, and the output current can reach ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More