

Self-adaptive sliding mode control method and system and mobile robot controller
A mobile robot, self-adaptive sliding mode technology, applied in the control/regulation system, non-electric variable control, two-dimensional position/channel control and other directions, can solve the problems of system instability, trajectory tracking failure, etc. Robustness, the effect of reducing chattering phenomena
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
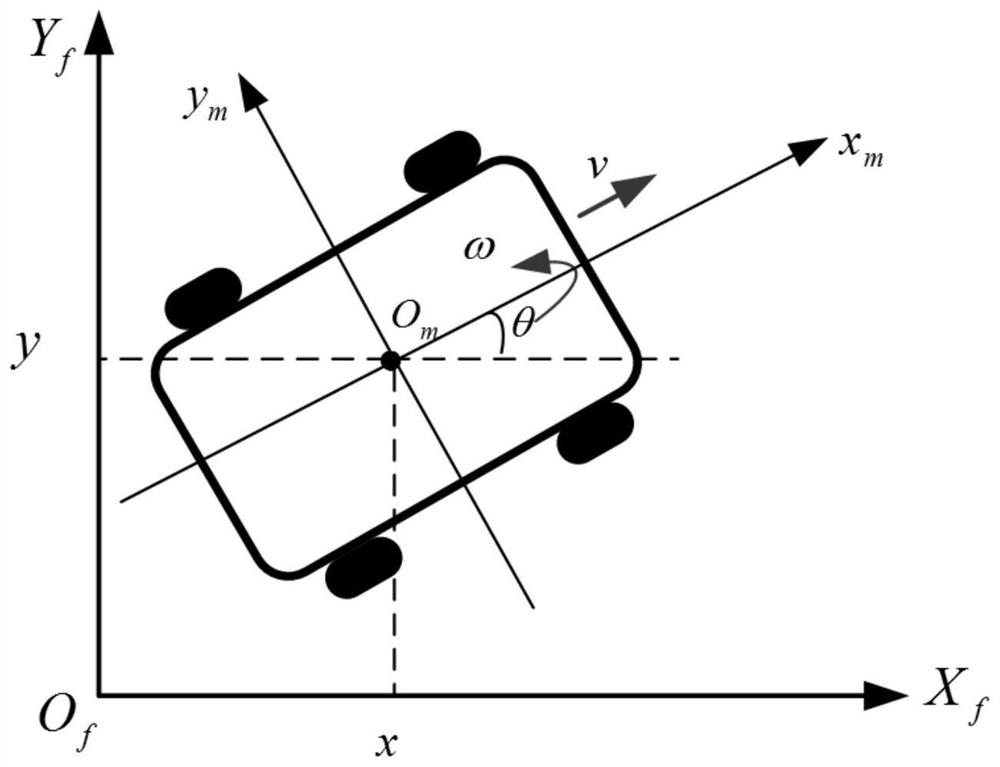
[0055] Wheeled mobile robot models, such as figure 1 As shown, the mobile robot in the figure has relatively obvious structural features. There are two driving wheels, mainly used to drive the system, and two follower wheels, mainly to grasp the direction of motion. Two DC motors are respectively configured to pair The left and right driving wheels are controlled. When the speeds of the two motors are inconsistent, the resulting speed difference controls the robot to turn in a certain direction through the driving wheels, thereby realizing the turning of the robot.
[0056] An adaptive sliding mode control method provided by an embodiment of the present invention includes:
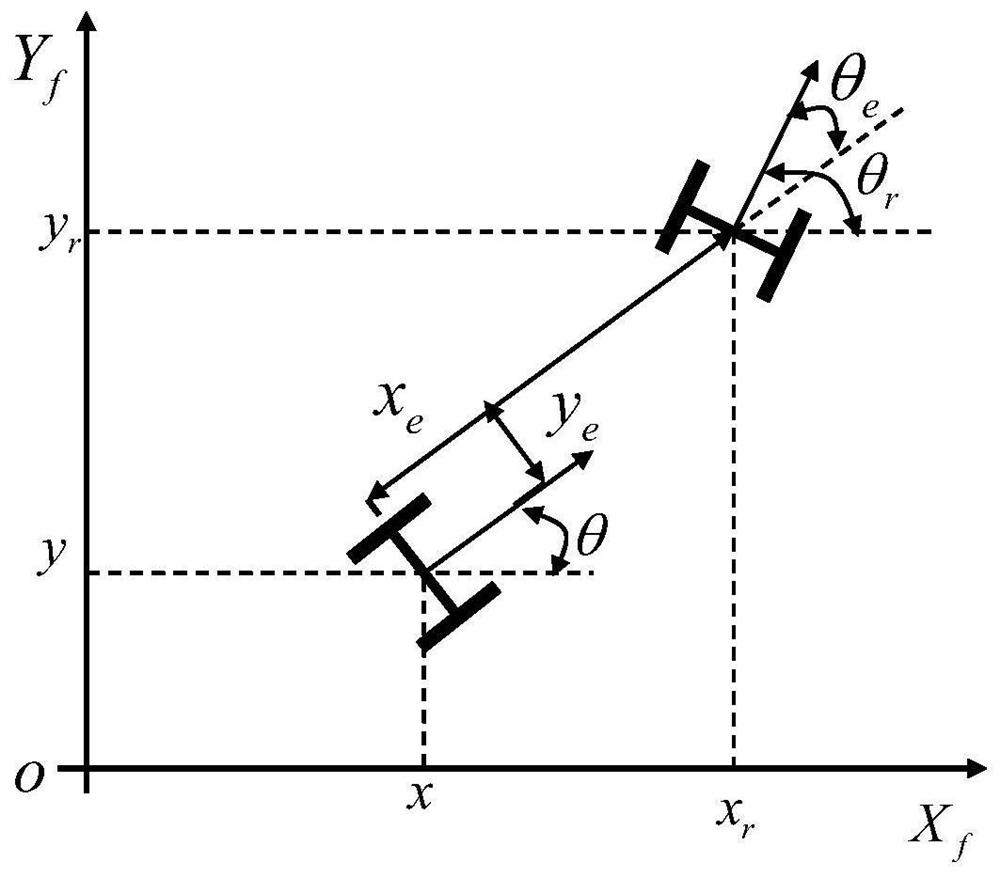
[0057] Taking the midpoint coordinates of the driving wheels on the wheeled mobile robot as the position of the wheeled mobile robot, establishing and obtaining the kinematic equation of the wheeled mobile robot according to the control input signal, and obtaining the expected pose coordinates through the ...
Embodiment 2
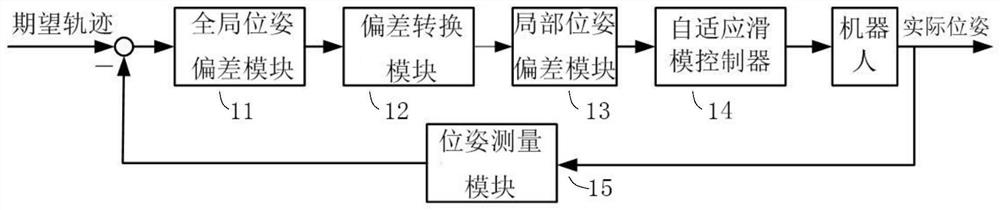
[0128] Such as figure 2 As shown, the embodiment of the present invention also provides an adaptive sliding mode control system, including:
[0129] The global pose deviation module 11 is used to adjust the input signal of the robot under the condition of satisfying the motion constraints of the robot according to the expected running trajectory of the system, and then determine the pose coordinates of the robot in each motion state and convert the current pose The coordinates are compared with the expected pose coordinates to obtain the global pose deviation;
[0130] The deviation conversion module 12 is used to perform deviation conversion according to the global pose deviation obtained by the global pose deviation module 11, and output the local pose deviation to the local pose deviation module 13 through the transformation matrix;
[0131] The local pose deviation module 13 is used to receive the data converted by the deviation conversion module 12 and output the data t...
Embodiment 3
[0134] The embodiment of the present invention also provides a mobile robot controller, including a processor 21 and a memory 22, and a computer program is stored in the memory, and when the computer program is executed by the processor, it can realize any of the above-mentioned The adaptive sliding mode control method described above.
[0135] Such as Figure 14 As shown, the communication bus 23 is used to realize connection and communication between these components, and the memory 22 may optionally also be a storage device independent of the aforementioned processor 21 . Those skilled in the art can understand that, Figure 14 The structure of the task processing device shown in is not limited to the task processing device, and may include more or less components than shown in the figure, or combine some components, or arrange different components. Figure 14 The memory 22 as a computer storage medium may include an operating system, a network communication module, and a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More