

Indoor pedestrian positioning method, device and system based on Kalman filtering
A technology of Kalman filtering and positioning method, applied in radio wave measurement systems, positioning, measuring devices and other directions, can solve the problems of large pedestrian positioning errors and low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
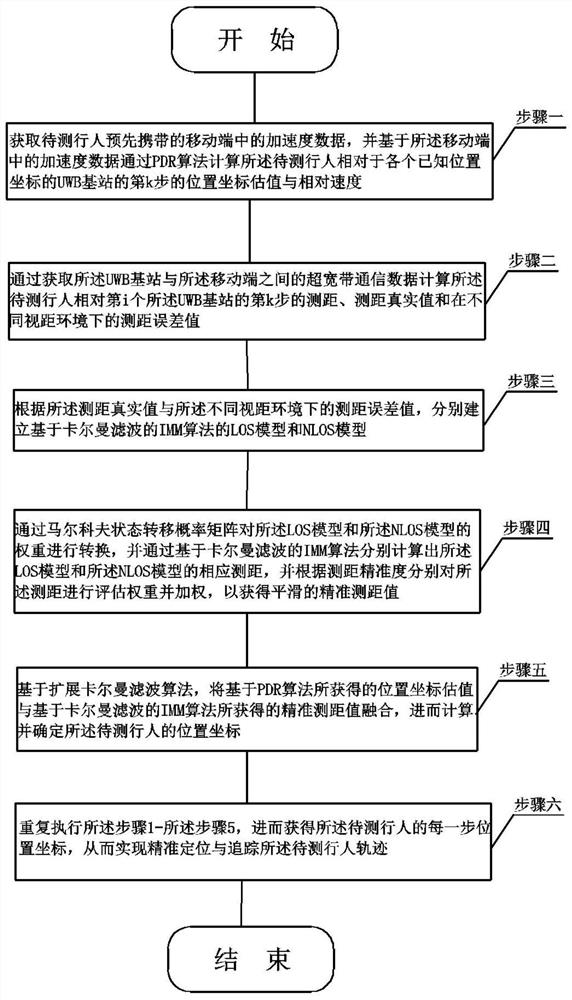
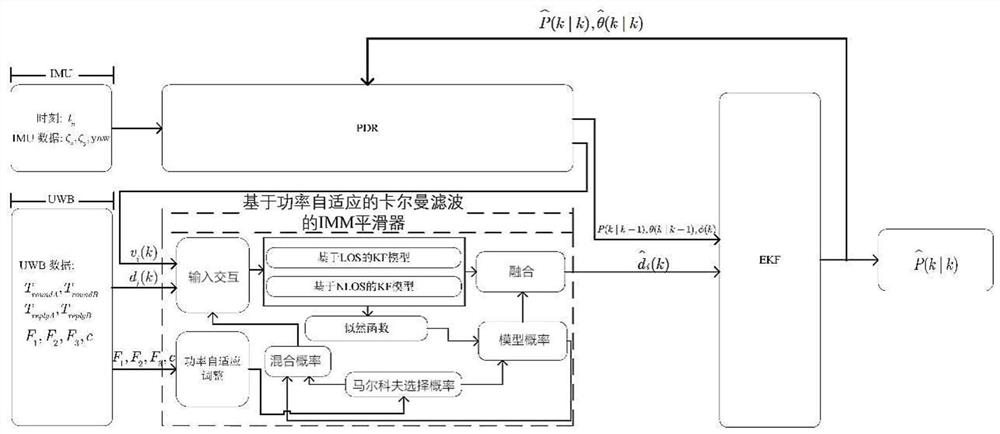
[0094] For ease of understanding, please refer to figure 1 and figure 2 , a kind of indoor pedestrian localization method based on Kalman filter provided by this application, comprises the following steps:
[0095] Step 1: Acquire the acceleration data in the mobile terminal carried in advance by the pedestrian to be tested, and calculate the position of the pedestrian to be tested relative to the kth step of the UWB base station of each known position coordinate through the PDR algorithm based on the acceleration data in the mobile terminal Coordinate estimates and relative velocity v i (k), relative velocity v i (k) Observations of the LOS model and the NLOS model of the Kalman filter-based IMM algorithm;
[0096] It should be noted that the relative velocity v in step 1 i (k) Observations as the LOS model and NLOS model of the Kalman filter-based IMM algorithm, which can improve the localization accuracy.
[0097] Step 2: Calculate the distance d of the k-th step of t...
Embodiment 2
[0176] The second embodiment provides an indoor pedestrian positioning device based on Kalman filtering, including:
[0177] The first acquisition module is used to acquire acceleration data of the inertial measurement unit in the mobile terminal;
[0178] The first calculation module is used to calculate the position coordinates and relative velocity of the pedestrian to be measured relative to the kth step of each UWB base station based on the acceleration data obtained by the first acquisition module based on the preset PDR algorithm;
[0179] The second acquisition module is used to acquire the distance measurement of the pedestrian to be measured at the kth step relative to the i-th base station, the real value of the distance measurement and the measurement in different line-of-sight environments according to the ultra-wideband communication data between the base station and the mobile terminal. distance error value;
[0180] The first processing module is used to respe...
Embodiment 3
[0185] The third embodiment provides an indoor pedestrian positioning system based on Kalman filtering, including:
[0186] At least three UWB base stations are located at preset positions in the indoor environment, and the UWB base stations are provided with a first ultra-wideband module;
[0187] The mobile terminal is located on the pedestrian to be tested, and the mobile terminal is provided with an inertial measurement unit and a second ultra-wideband module connected to the first ultra-wideband module for ultra-wideband communication;
[0188]The receiver is used to receive the acceleration data sent by the inertial measurement unit, and to receive the ranging information sent by the first ultra-wideband module and the second ultra-wideband module respectively, and the ranging information includes the k-th information of the pedestrian to be measured relative to the i-th UWB base station. Step ranging, ranging true value and ranging error value under different line-of-si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More