

Multi-modal three-dimensional point cloud segmentation system and method
A 3D point cloud and multi-modal technology, applied in 3D object recognition, character and pattern recognition, biological neural network models, etc., can solve the problem of being unable to directly process large-scale real point cloud scenes, susceptible to noise interference, and lack of information fusion and other issues to achieve good generalization, good robustness, and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
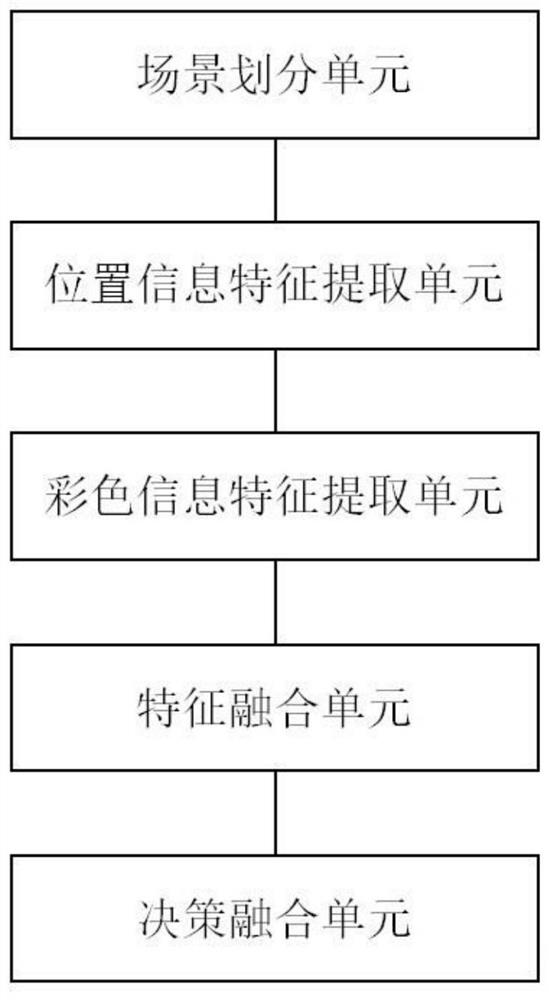
[0033] figure 1 It is a flow chart of multimodal 3D point cloud scene segmentation according to Embodiment 1 of the present invention, refer to below figure 1 , detail each step.
[0034] Step 1. Preprocess the collected data. According to the corresponding relationship between point cloud data and image pixels, back-project to obtain point cloud data with color information and spatial coordinates, and divide the whole scene into smaller area.
[0035] In this example the data is collected using a specific camera that combines 3 structured light sensors with different pitches to capture 18 RGB and depth images during a 360° rotation of each scanning position. Each 360° scan is performed in 60° increments, providing 6 sets of triple RGB-D data for each position. The output is a reconstructed 3D textured mesh of the scanned area, raw RGB-D image and camera metadata. Additional RGB-D data was generated based on this data, and a point cloud was made by sampling the mesh.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More