

Spatial positioning and attitude navigation of assembly tool by using machine vision
An assembly tool and machine vision technology, applied in the field of visual measurement technology and intelligent assembly, can solve problems such as inconvenient use, affecting measurement accuracy, and inability to meet wireless positioning of wireless assembly tools, and achieve the effect of ensuring operational flexibility and light structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
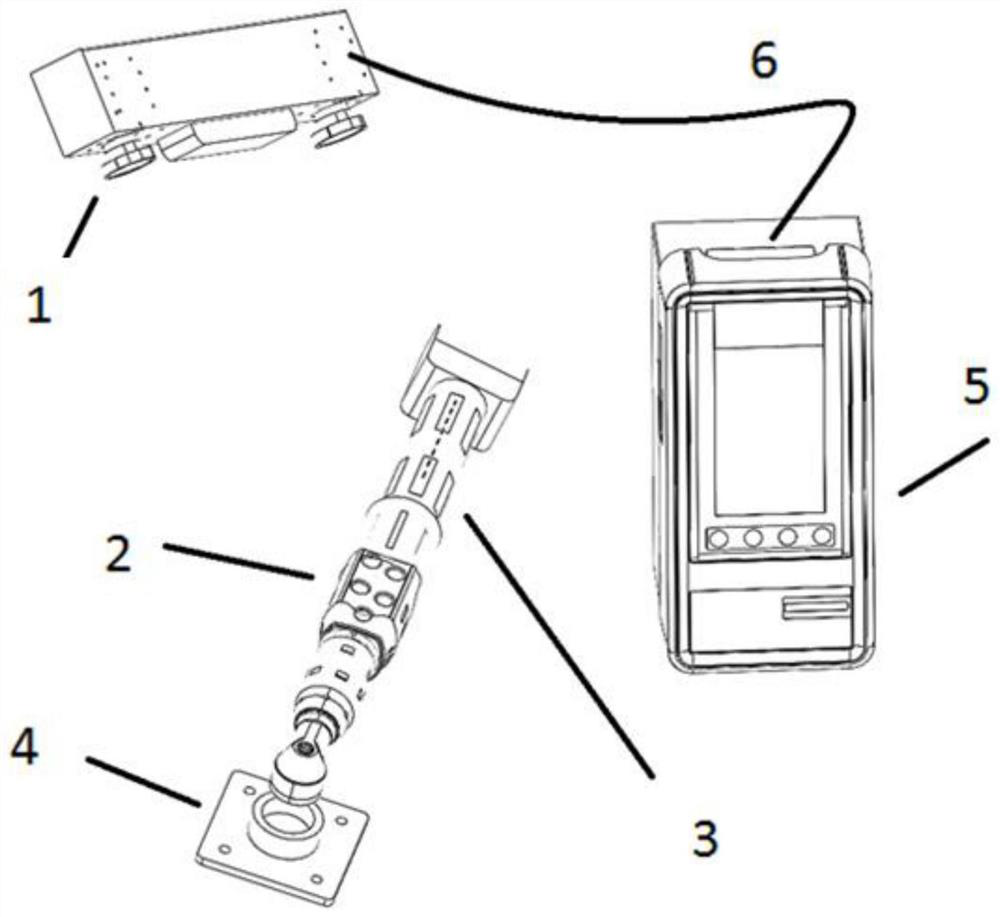
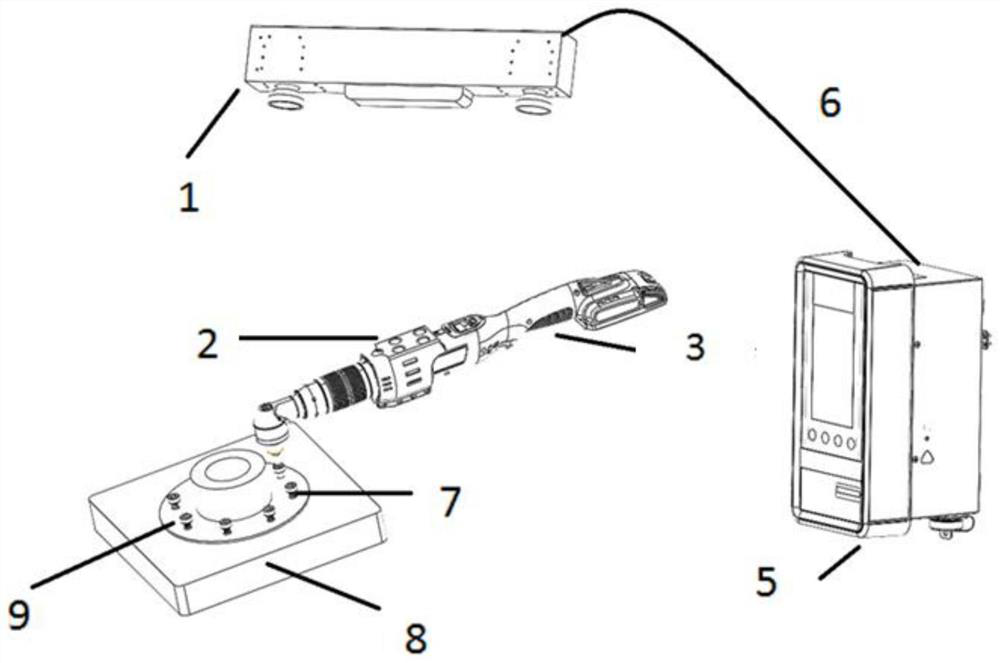
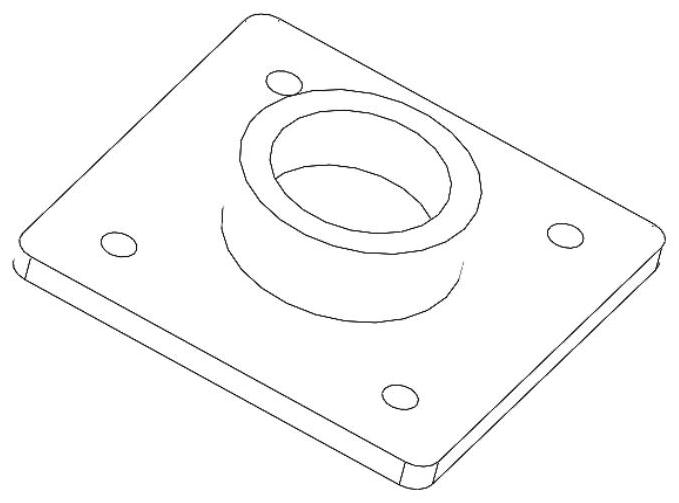
[0040] Such as figure 1 , figure 2 and image 3 As shown, the system used for space positioning and attitude navigation of assembly tools using machine vision includes: assembly tool control system 5 connected to monocular or binocular vision 3D measurement host 1 through wireless or wired communication 6, passive reflective marking device 2 set On the assembly tool 3, the passive reflective marking point device 2 is provided with a plurality of passive reflective marking points. A passive reflective marker point device 2, a monocular or binocular vision three-dimensional measurement host 1 outputs the results to the control system 5 of the assembly tool in real time through various wireless and wired communication protocols; Calibration, the calibration plate 4 is provided with a connection port, the axis of the connection port coincides with the axis of the output end of the assembly tool 3, and the end faces are in close contact. The connection port is used to closely co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More