

Unmanned ship real-time speed measurement method and system based on twin data driving
A data-driven, real-time speed technology, applied in the field of unmanned boat measurement, can solve the problems of inability to meet complex tasks, increase the complexity and cost of the sensing system, and cannot solve the problems of real-time attitude measurement and state perception of unmanned boats
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
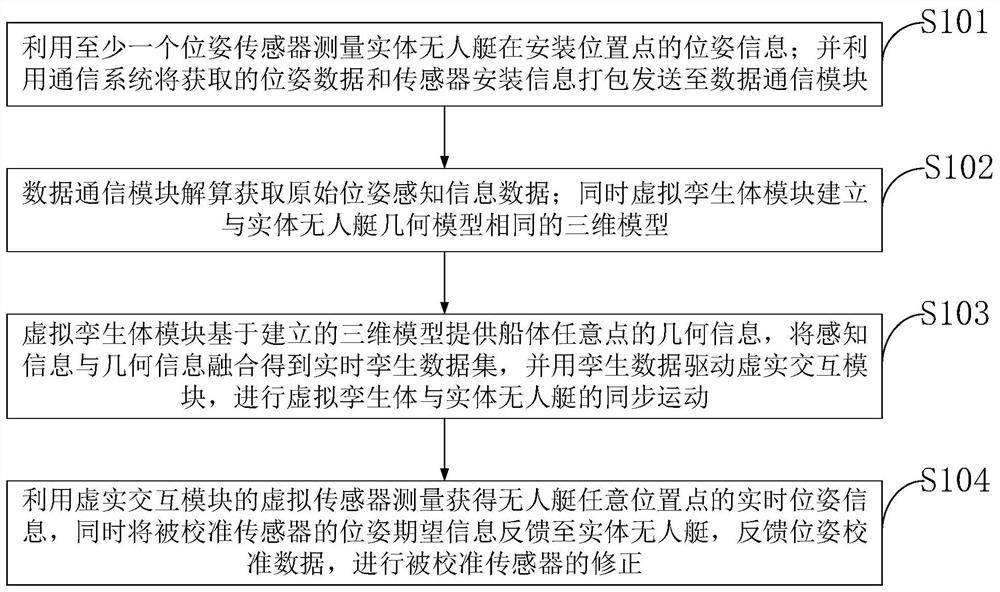
[0115] In order to solve the perceptual technical problem of acquiring the position and attitude information of any position of the unmanned boat based on at least one set of position and attitude sensors, the present invention proposes a method and system for real-time speed measurement of the unmanned boat at any position based on fusion twin data.
[0116] (1) Method introduction
[0117] The motion of the unmanned boat includes translation in three directions and rotation in three directions, and the position and attitude sensor can obtain the motion state information of the six degrees of freedom where the installation point is located. The unmanned boat can be regarded as a rigid body, so the translational state of all points of the unmanned boat is the same, and the rotational angular velocity and angular acceleration are also the same, but due to the rotational motion, the rotational linear velocity of each point on the rigid body is actually different. It is known tha...
Embodiment 2
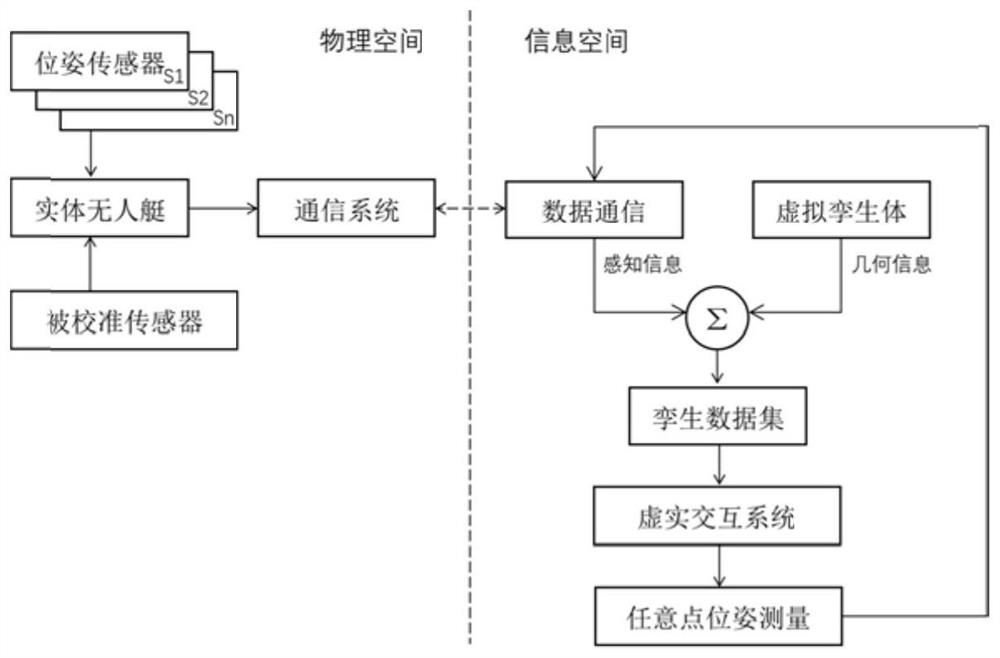
[0132] In this embodiment, the method and system for measuring the position and attitude of any position point in the present invention will be verified on a small unmanned boat. Since the angular velocity of any point on the rigid body of the UAV is the same, this embodiment only shows the measurement result of the linear velocity. This embodiment is mainly divided into two parts: an unmanned boat and a host computer. The unmanned boat includes sensors and communication equipment on board; the host computer includes a PC and communication equipment, and the software of the present invention (including data processing, virtual-real interaction system, etc.) is installed in the PC. ).
[0133]As a physical object in physical space, an unmanned boat is equipped with sensors such as GPS, gyroscope, and magnetometer. The position data is given in the form of longitude and latitude, and the attitude data is given in the form of Euler angles.
[0134] The communication equipment o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More