

Sensing and control system and method for lower limb joint assisting exoskeleton system
A control method and exoskeleton technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of poor measurement reliability, poor anti-vibration and shock performance, and increasing the complexity and time of wearing the exoskeleton system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
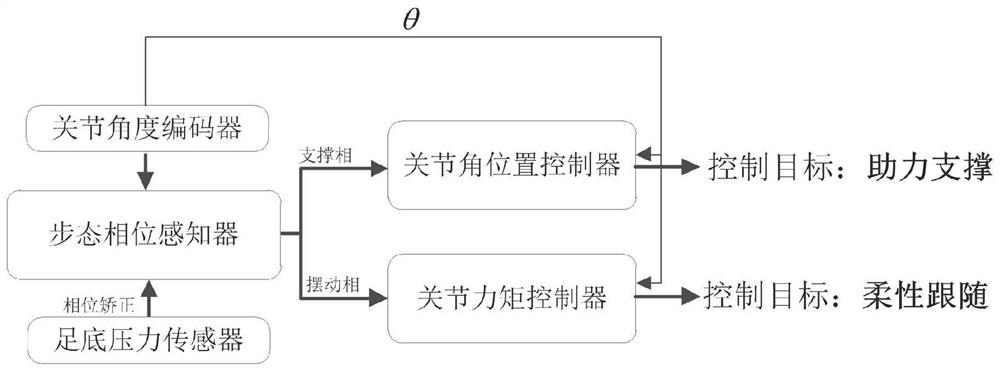
[0037] Please refer to the attached figure 1 , the present invention provides a lower extremity joint power-assisted exoskeleton system perception and control system, including: a joint angle encoder, a gait phase sensor, a joint angle position controller and a joint torque controller, wherein,
[0038] The joint angle encoder measures the joint angle position, and its output signals are sent to the gait phase sensor, joint angle controller and joint torque co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More