

3D printing navigation system and method for ischial osteotomy in triple osteotomy for hip dislocation
A 3D printing and navigation system technology, applied in the field of surgical auxiliary devices, can solve problems such as necrosis of the femoral head, increase the difficulty of surgery, and reduce the risk of surgery, and achieve the effects of achieving accuracy, osteotomy accuracy, and reducing errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
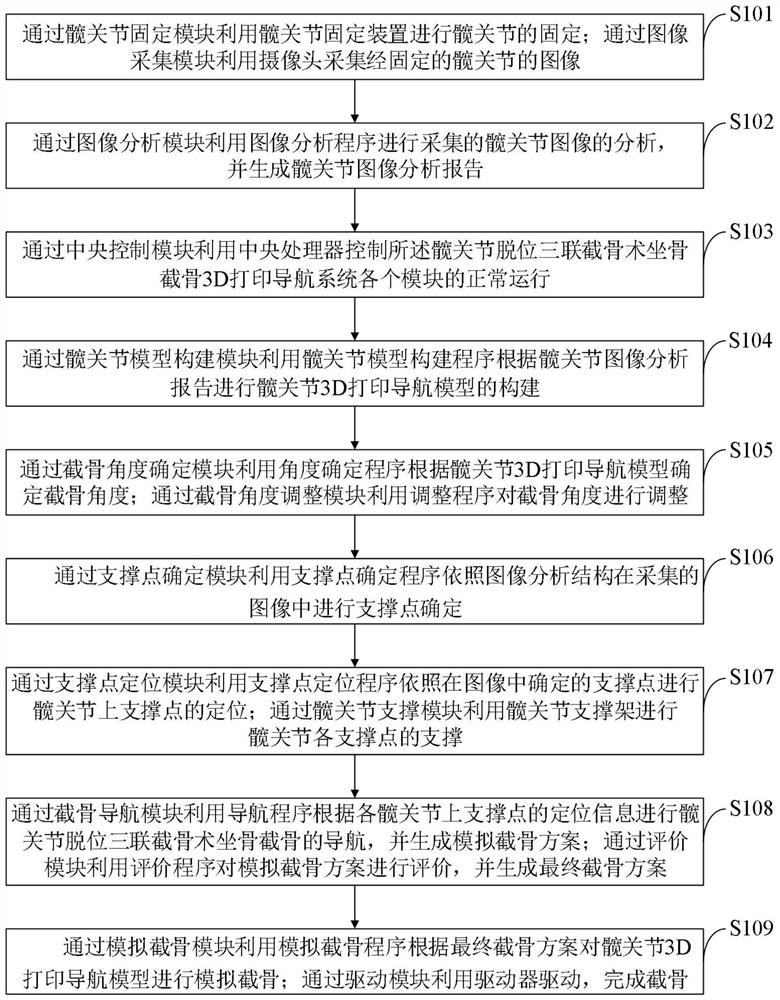
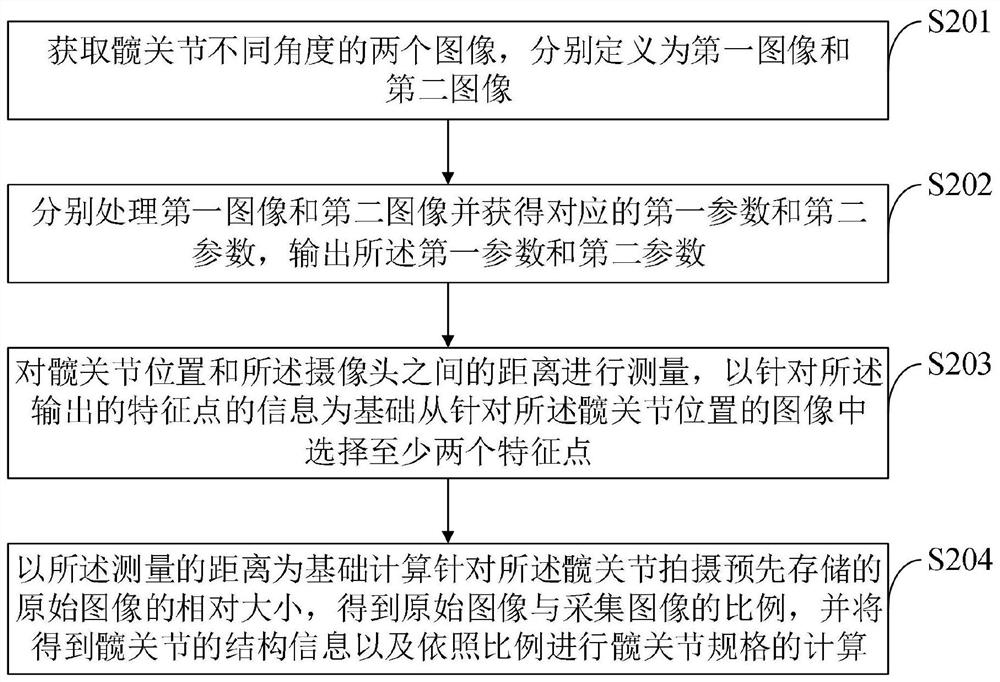
[0080] The 3D printing navigation method for ischial osteotomy provided by the embodiment of the present invention is as follows: figure 1 As shown, as a preferred embodiment, such as image 3 As shown, the method for analyzing the collected hip joint image through the image analysis module using the image analysis program provided by the embodiment of the present invention includes:
[0081] S201, acquiring two images of different angles of the hip joint, which are respectively defined as a first image and a second image;
[0082] S202. Process the first image and the second image respectively to obtain corresponding first parameters and second parameters, and output the first parameters and second parameters;
[0083] S203, measure the distance between the hip joint position and the camera, and select at least two feature points from the image for the hip joint position based on the information about the output feature points;
[0084] S204. Calculate the relative size of ...
Embodiment 2
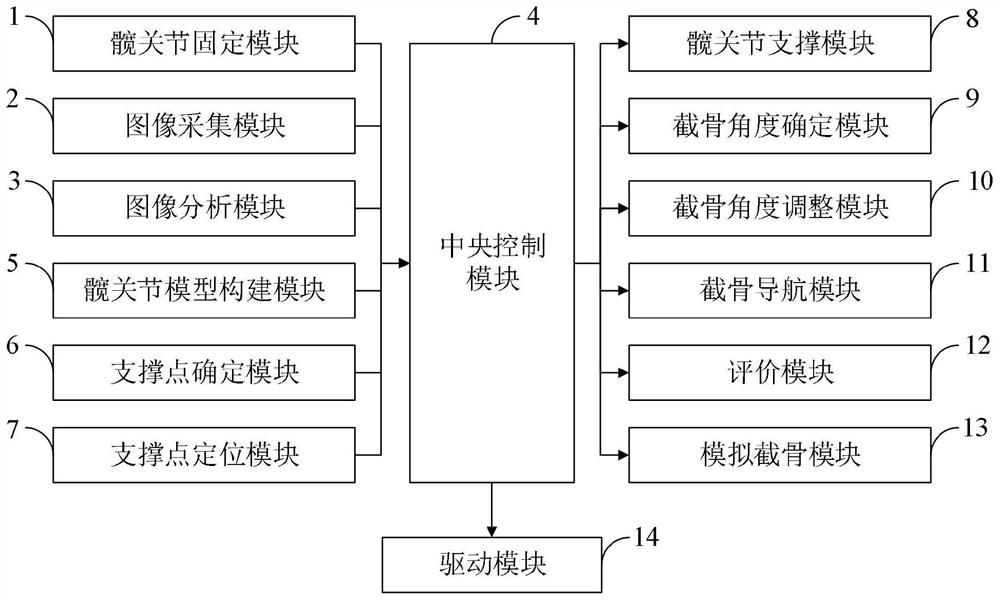
[0087] The 3D printing navigation method for ischial osteotomy provided by the embodiment of the present invention is as follows: figure 1 As shown, as a preferred embodiment, such as Figure 4 As shown, the method for constructing a hip joint model by using the hip joint model construction program through the hip joint model construction module provided by the embodiment of the present invention includes:
[0088] S301, using the hip joint model construction module to construct descriptors for the feature points according to the feature points determined in the image analysis to obtain descriptors of the feature points;
[0089]S302. In the first image and the second image, find matching feature points according to the descriptors of the feature points, and establish a matching relationship to obtain a disparity map;
[0090] S303. Using the disparity map, the internal parameters and external parameters of the camera, obtain the spatial position of the feature point correspo...
Embodiment 3
[0096] The 3D printing navigation method for ischial osteotomy provided by the embodiment of the present invention is as follows: figure 1 As shown, as a preferred embodiment, such as Figure 5 As shown, the method for adjusting the osteotomy angle through the osteotomy angle adjustment module and the adjustment program provided by the embodiment of the present invention includes:
[0097] S401, determine the osteotomy angle according to the 3D printed navigation model of the hip joint by using the angle determination program through the osteotomy angle determination module;
[0098] S402. Detect the actual position information of the osteotomy device, and calculate an offset through the osteotomy angle adjustment module according to the received actual position information of the osteotomy device and predetermined angle information;
[0099] S403, using the adjustment program to adjust the position of the osteotomy device according to the offset, so that the adjusted positio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More