

Full-sea deep underwater robot and positioning method thereof
A technology of underwater robot and positioning method, which is applied to underwater operation equipment, instruments, electric controllers, etc., and can solve problems such as limited range and discrete sound wave measurement data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
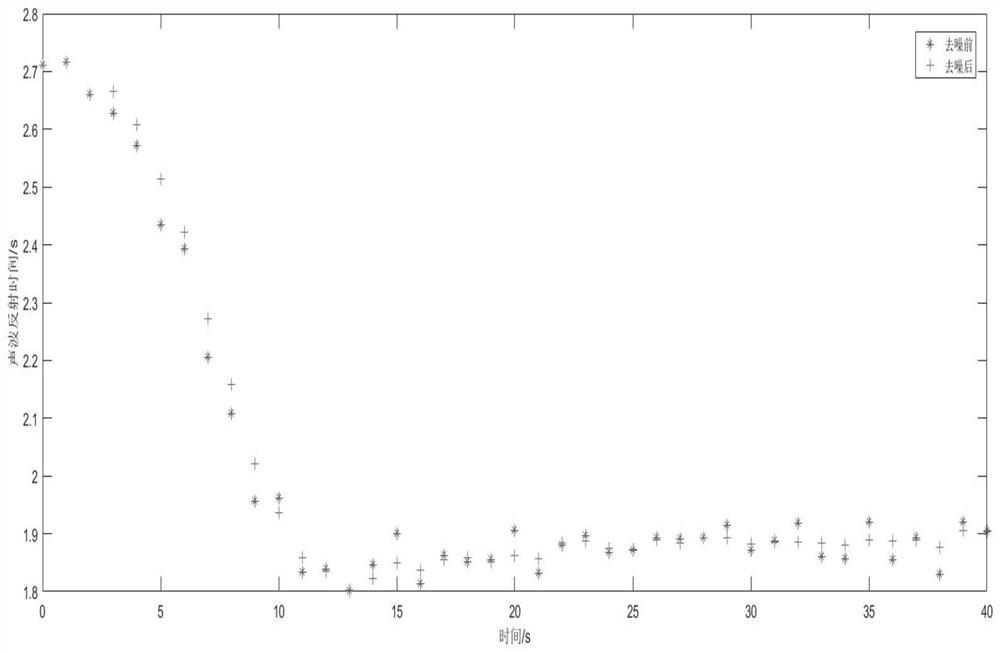
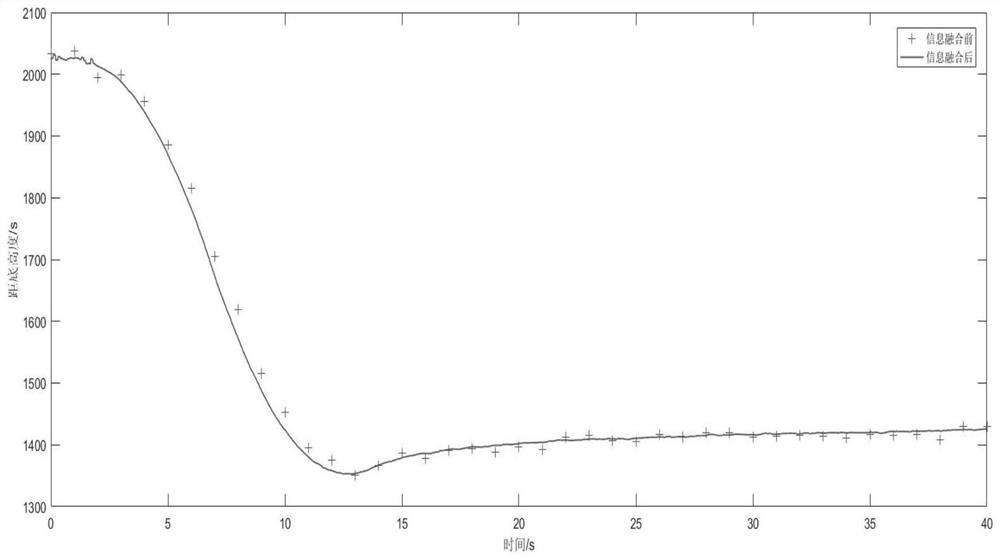
[0087] In order to verify the control perception and fusion of the vertical motion of the underwater robot, this embodiment constructs a kinematics model through the hydrodynamic parameters of the robot, and simulates the ocean environment by adding Gaussian white noise.
[0088] Among them, in order to study the control effect of the control system and the effect of denoising and information fusion of sensor data, two different state models are constructed, and the same underwater robot motion model is used. By verifying the research objectives separately, the denoising effect of the system and the correction effect of the Kalman filter on the single-beam altimeter data can be observed more intuitively after information fusion. The accuracy and system response time of the control system of the underwater robot to the robot can be obtained by setting different expected depths and comparing the data.
[0089] Specifically, the noise in the ocean environment and the sensor data ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More