

Wind energy and solar energy hybrid driven unmanned sea-air three-dimensional monitoring ship
A technology of hybrid drive and solar energy, which is applied in the direction of wind power generation, wind engine, wind motor combination, etc., can solve the problems of being easily affected by waves, small search and rescue range, and limited search and rescue range, so as to ensure long-term operation capability and reduce the cost of ships. The height of the center of gravity and the effect of improving survivability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
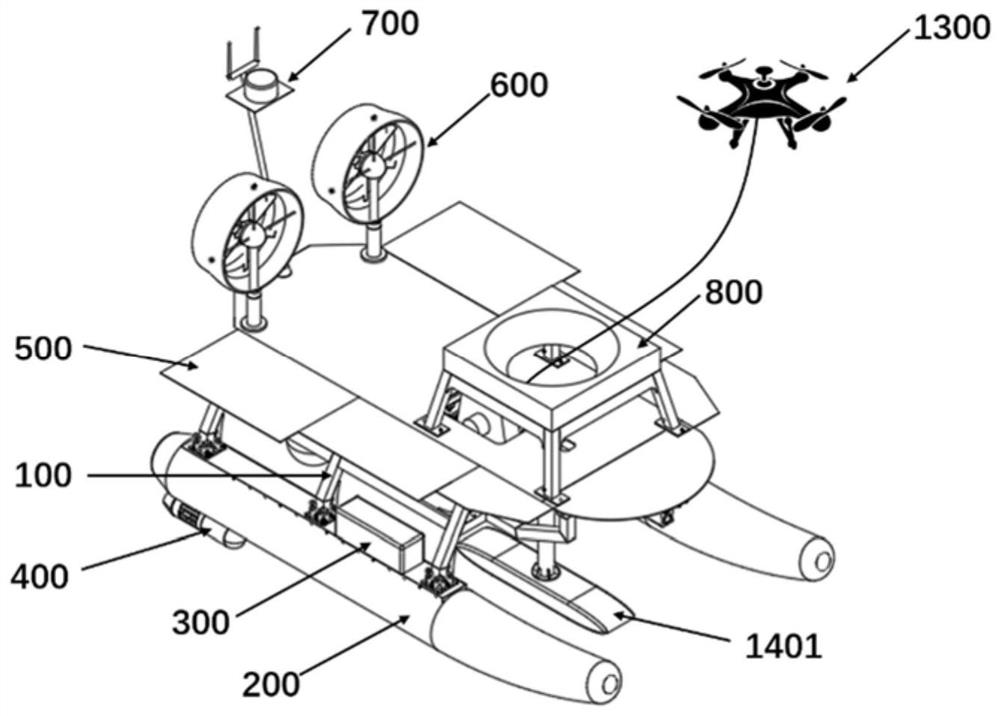
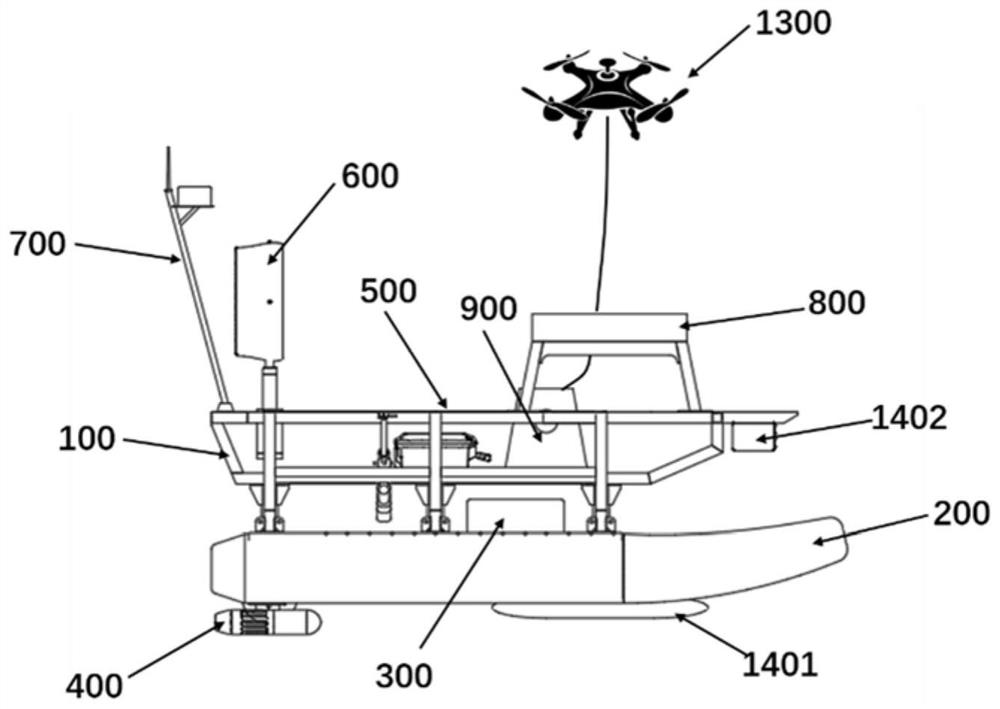
[0063] The invention provides an unmanned sea-air three-dimensional monitoring ship driven by wind energy and solar energy hybrid, such as Figure 1 to Figure 6 As shown, it includes a hull, a power system, a control system and a three-dimensional detection system. The hull has a bearing function for carrying the power system, a control system and a three-dimensional detection system. The progress of the hull provides power, and the electric energy required by the power system comes from its own photovoltaic power generation system 500 and wind turbine 600, wherein the photovoltaic power generation system 500 uses expandable solar panels 501 and is controlled by the control system The orientation of the solar panel 501 is corrected in real time to track the maximum power of the solar energy. The wind turbine 600 adopts a liftable duct type wind turbine and adjusts the height of the wind turbine 600 through the control system for matching. Corresponding to the generated power a...
Embodiment 2
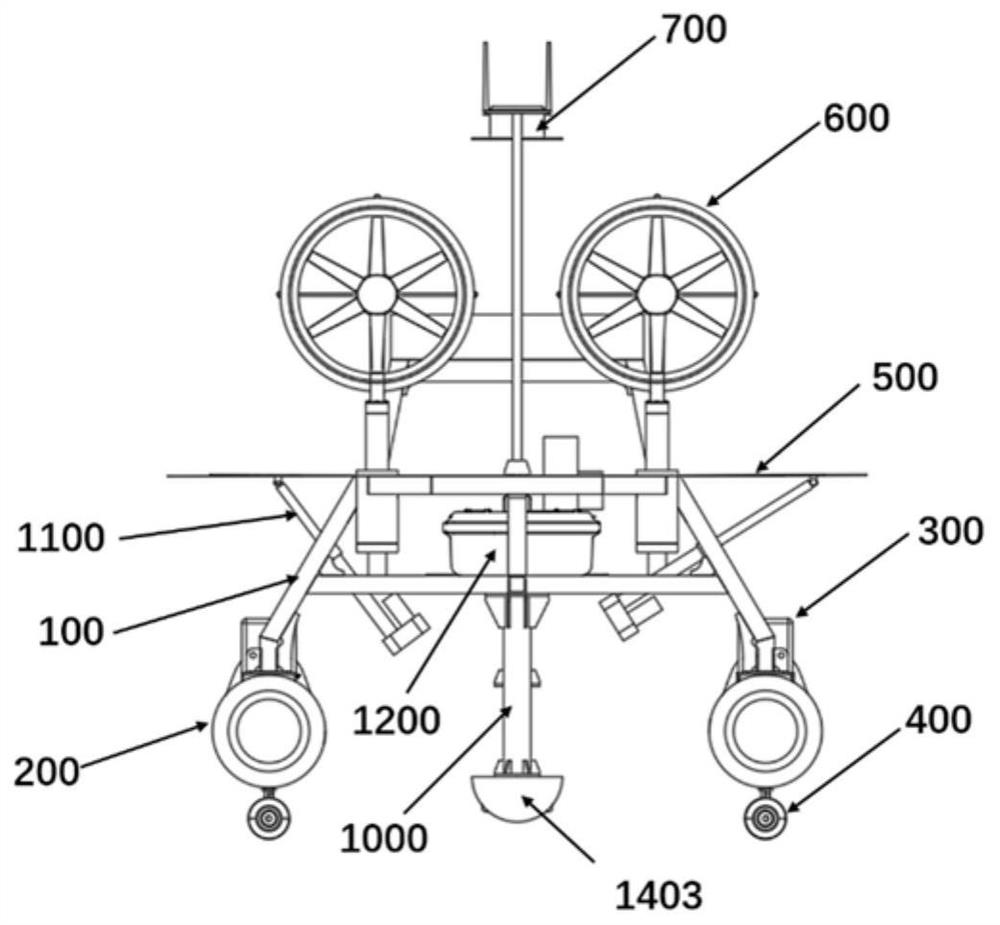
[0070] The invention provides an unmanned sea-air three-dimensional monitoring ship driven by wind energy and solar energy, including a hull, a power system, a control system and a three-dimensional detection system. The hull includes a truss structure 100 and a sheet body 200, and the truss structure 100 is Multi-layer truss structures, such as figure 1 , figure 2 , image 3 , Figure 5 As shown, the sheet body 200 is installed under the truss structure 100 to form a multi-body structure.
[0071] Further, the angle range between the horizontal transverse member 103 and the side inclined member 101 of the truss structure 100 is preferably between 110° and 130°, which can reduce the wind resistance suffered by the hull and increase the arrangement area of solar panels .
[0072] The power system includes a battery 300, a thruster 400, a photovoltaic power generation system 500 and a wind turbine 600. The thruster 400 is installed under the tail of the sheet body 200. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More