

Spatial intersecting curve weld joint structure modeling method based on line structured light vision
A technology of linear structured light and structural modeling, which is applied to the characteristics of welding rods, welding equipment, welding accessories, etc., can solve the problems that cannot meet the modeling requirements of curve welds, the model does not have universality, and lacks the structural characteristics of workpieces around the weld. detection, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The technical solution of the present invention will be further described below according to the drawings and specific embodiments.
[0078] A method for modeling spatially intersecting curve weld structures based on line structured light vision, comprising the following steps:
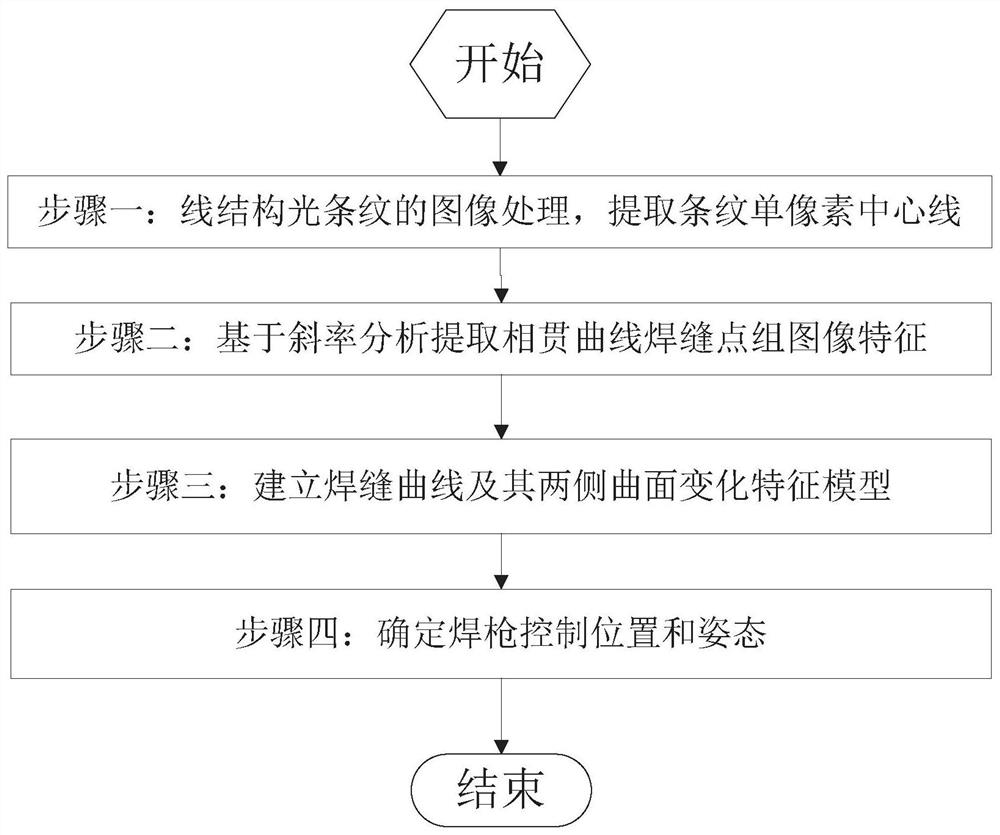
[0079] according to figure 1 The overall flow chart shown, the implementation steps are as follows:
[0080] Step 1: Process the structured light fringe image of the weld interface line, and extract the single-pixel centerline of the fringe.
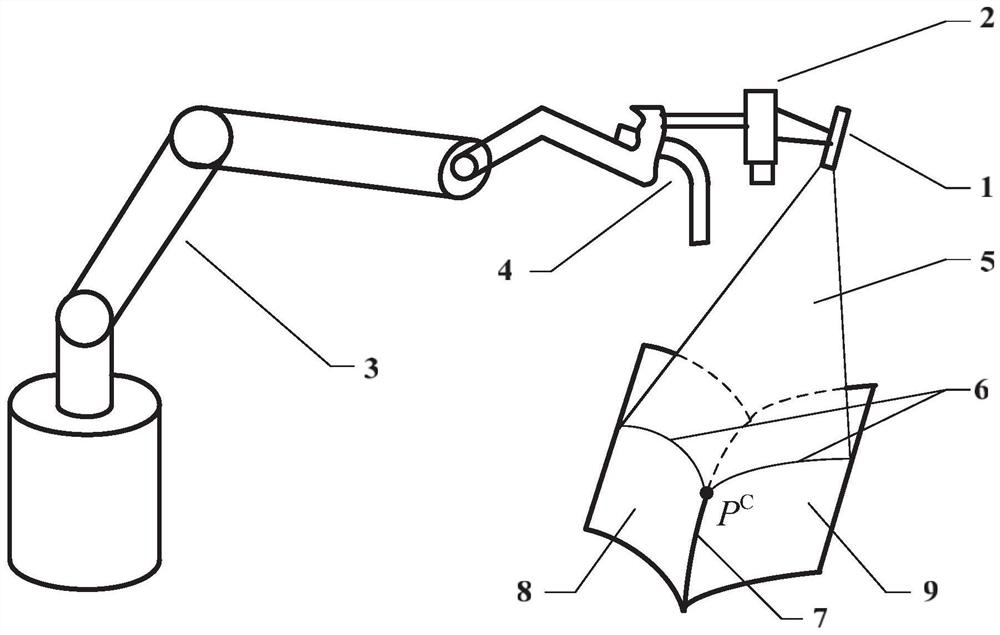
[0081] as attached figure 2 As shown, the line structured light laser 1 and the industrial camera 2 are fixedly installed on the end of the mechanical arm 3 to form a fixed relative position with the welding torch 4 . The movement of the mechanical arm 3 is controlled so that the line structured light emitted by the line structured light laser 1 is projected onto the intersecting curve weld interface, and the structured light plane 5 forms line struct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More