

Communicating system for underwater facility surface climbing robot and control method thereof
A communication system and robot technology, which is applied to the communication system and control field of underwater facility surface climbing robot, can solve the problems of complex data interaction relationship, unfavorable robot system function, complexity of robot body system and increased difficulty in development and debugging, etc. Achieve the effect of increasing data, avoiding data anomalies, and enhancing environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
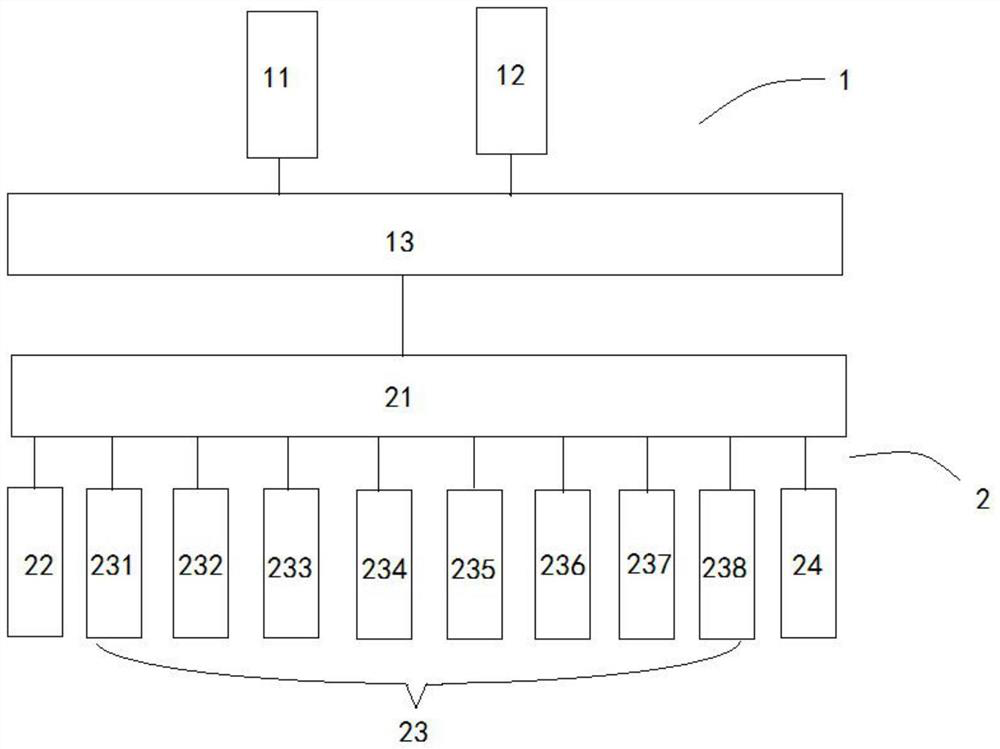
[0038] see figure 1 A communication system for an underwater facility surface climbing robot provided in this embodiment includes: a main control system 1 and an execution system 2, the main control system 1 includes a main control terminal operating module 11, a main control terminal control device 12 and a master control terminal communication module 13, the execution end system 2 includes an execution end communication module 21, an execution end controller 22, a plurality of sensor modules 23 and a driver module 24;
[0039] Wherein, the master control end system 1 is an upper computer, and the execution end system 2 is a lower computer.
[0040]The multiple sensor modules 23 include a power consumption management module 231 , a sealed cabin status monitoring module 232 and a driver status monitoring module 233 . It should be noted that the multiple sensor modules 23 in this embodiment are not limited to the three modules mentioned above, and the types or numbers of the m...
Embodiment 2
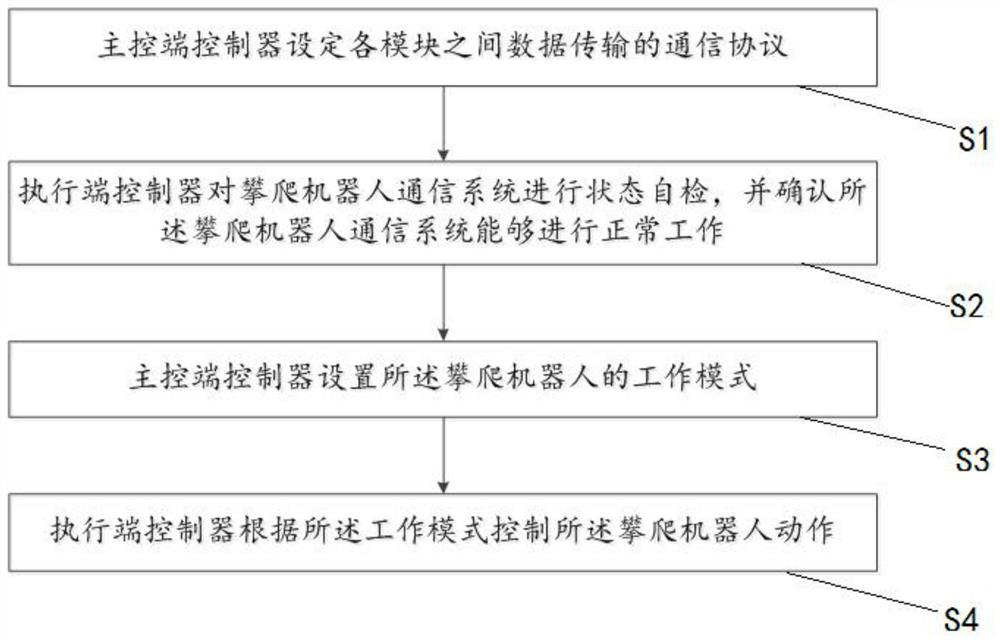
[0071] see figure 2 A control method for a communication system for an underwater facility surface climbing robot provided in this embodiment includes:
[0072] S1, the main control terminal controller 12 sets the communication protocol for data transmission between the modules;
[0073] Wherein, the communication protocol includes a topic (Topic) communication mechanism, a service (Server) communication mechanism and an action (Action) communication mechanism.
[0074] The topic (Topic) communication mechanism is an asynchronous communication mode based on the publish / subscribe model in ROS (Robot Operating System robot software platform). This method decouples the generation and use of information. For data communication that is constantly updated and contains less logic processing.
[0075] The service (Server) communication mechanism is based on the client (client) / server (server) model in ROS, which is mostly used to process synchronous communication in ROS, and is oft...
Embodiment 3
[0102] In order to enable the underwater climbing robot to accurately reach the target position during the movement and perform corresponding actions, the present embodiment provides a control method for the underwater climbing robot, the method comprising:
[0103] S101. The executive controller 22 receives a control command from the master system 1 and controls the driver module 24 to perform corresponding actions according to the command;
[0104] Among them, the control instructions received by the execution-end controller 22 include: the immediate instructions sent by the master-end operation module 11 and the instructions calculated by the path planning algorithm through the data information collected by internal sensors and external sensors.
[0105] The immediate instructions sent by the main control terminal operation module 11 include analog and digital quantities sent by operating devices such as operating handles, keyboards, voices, and gestures. The main control te...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More