

Nonlinear control method for double-end event triggering
A nonlinear control, event-triggered technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of fuzzy controller design and stability, to ensure stability, ensure smooth communication, reduce conservative effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
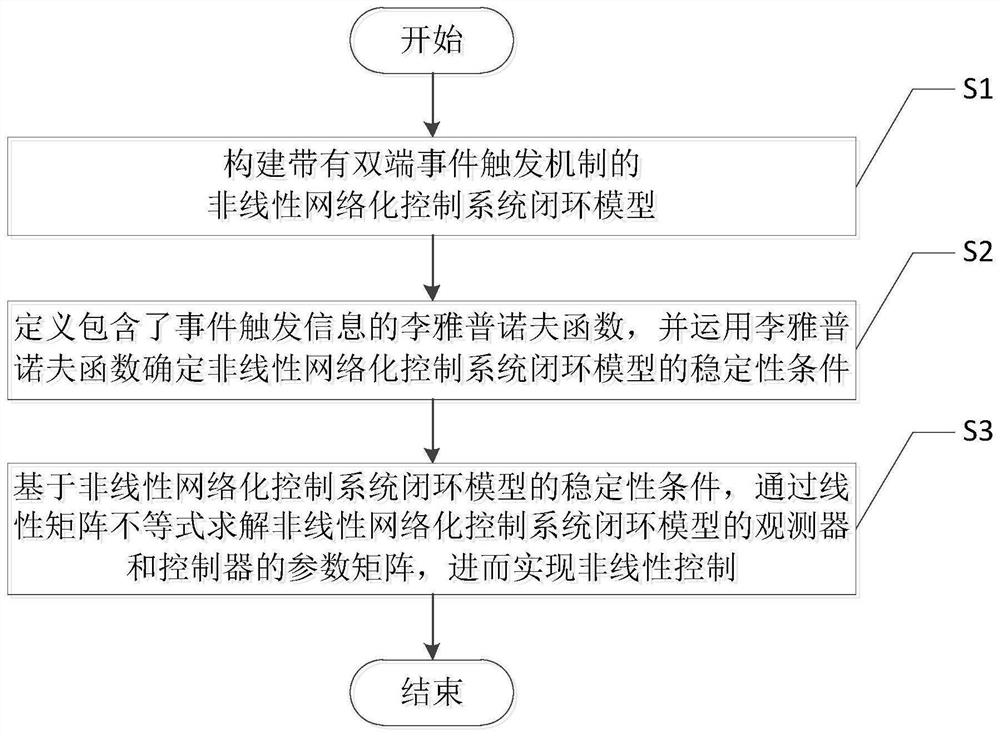
[0026] Such as figure 1 As shown, a nonlinear control method triggered by double-ended events, including the following steps:
[0027] S1. Construct a closed-loop model of a nonlinear networked control system with a double-ended event trigger mechanism;
[0028] S2. Define the Lyapunov function that includes the event trigger information, and use the Lyapunov function to determine the stability condition of the closed-loop model of the nonlinear networked control system;
[0029] S3. Based on the stability condition of the closed-loop model of the nonlinear networked control system, solve the parameter matrix of the observer and the controller of the closed-loop model of the nonlinear networked control system through the linear matrix inequality, and then realize the nonlinear control.
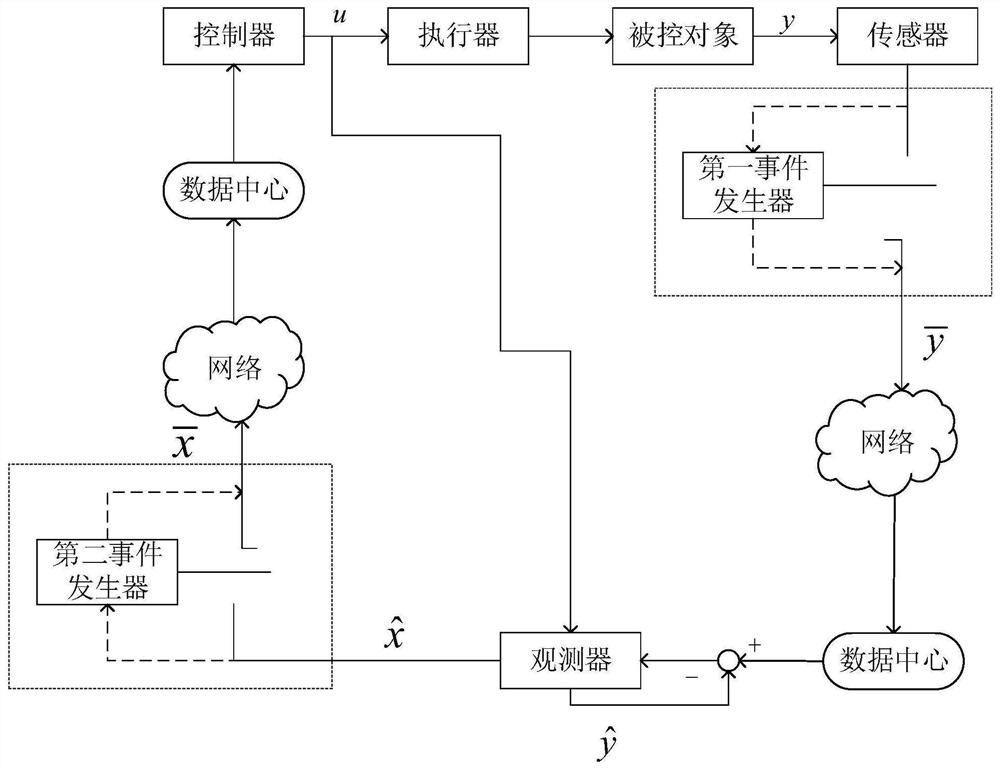
[0030] Such as figure 2 As shown, the closed-loop model of the nonlinear networked control system in step S1 includes a controlled object, a sensor, an observer, a controller, and an actuat...
Embodiment 2
[0235] This embodiment provides a simulation example based on the method in the above-mentioned embodiment 1:
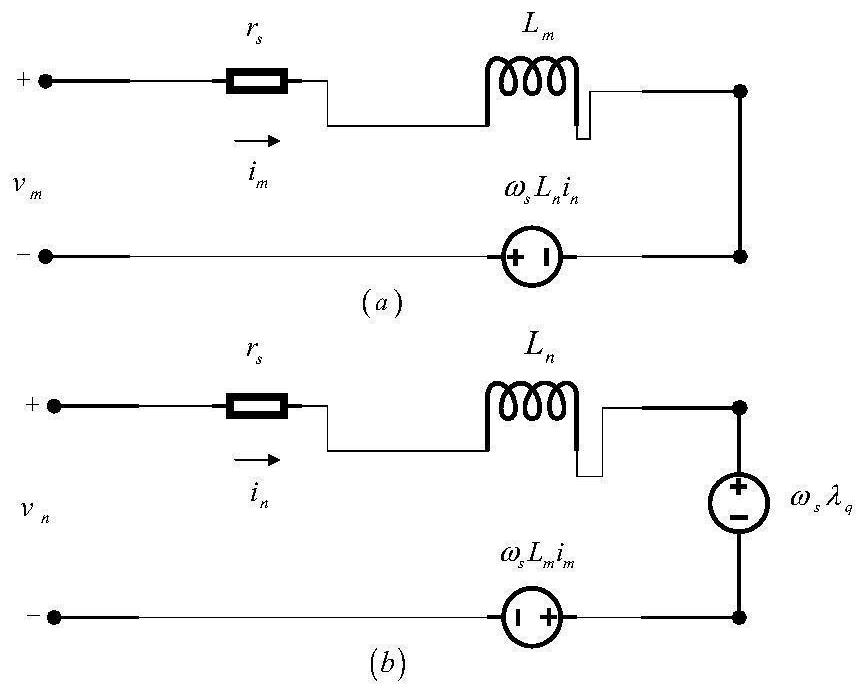
[0236] Such as image 3 As shown, the permanent magnet synchronous motor uses the rotor reference system to convert the feedback current signal, and the mathematical model of the permanent magnet synchronous motor is expressed as follows:
[0237]
[0238]
[0239] In the formula, v m and v n Indicates the voltage in the rotor reference frame, i m and i n Indicates the current in the rotor reference frame, ω s Indicates the motor speed, and refer to Table 1 for other physical parameters.
[0240] In order to simplify the design of the control rate, it is assumed that the m-axis current is zero. Then, using the n-axis current to adjust the electromagnetic torque, the electromagnetic torque can be expressed as follows:
[0241]
[0242] The dynamic equation can be expressed as follows:
[0243]
[0244]
[0245]
[0246] where T L Indicates t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More