

Under-actuated double-swing tower crane trajectory tracking and swing suppression control method
A technology of tower crane and track tracking, which is applied in the direction of load block, load hanging components, transportation and packaging, etc., and can solve problems such as complex dynamic model of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
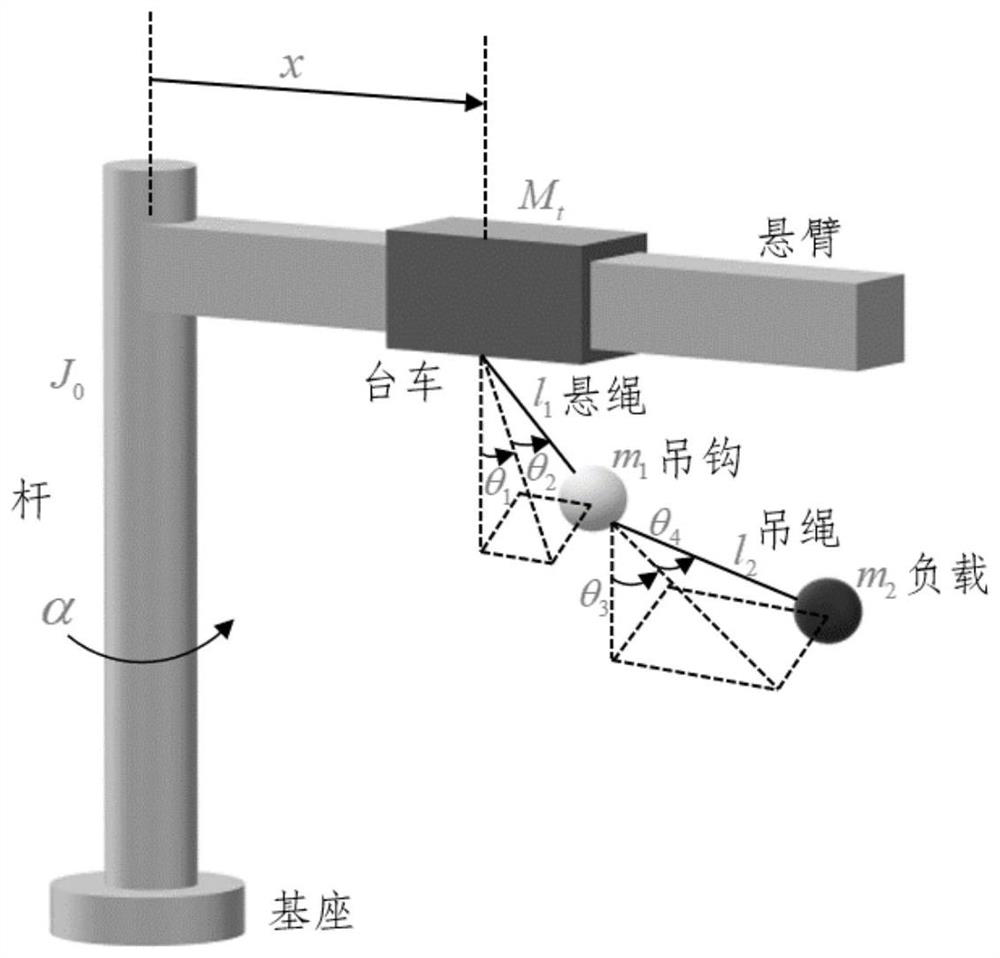
[0053] The previous underactuated crane positioning and anti-sway control is usually aimed at the bridge crane system. Even if the multi-degree-of-freedom bridge crane moves in three-dimensional space, the dynamic nature of its drive mechanism is still a linear force, and the dynamic characteristics are still simple. The control Convenient, but when there are different driving forces in the crane transportation task, such as the control of the tower crane studied in the present invention, one direction is the translation force of the trolley, and the other direction is the torque of the cantilever; at this time, due to the centrifugal The participation of motion makes the dynamic characteristics of the system very complicated. At the same time, when the mass of the load and the hook are similar, or the suspension rope and the length of the suspension rope are similar, the double pendulum characteristics of the crane system are more obvious. At this time, it is inevitable to appe...
Embodiment 2
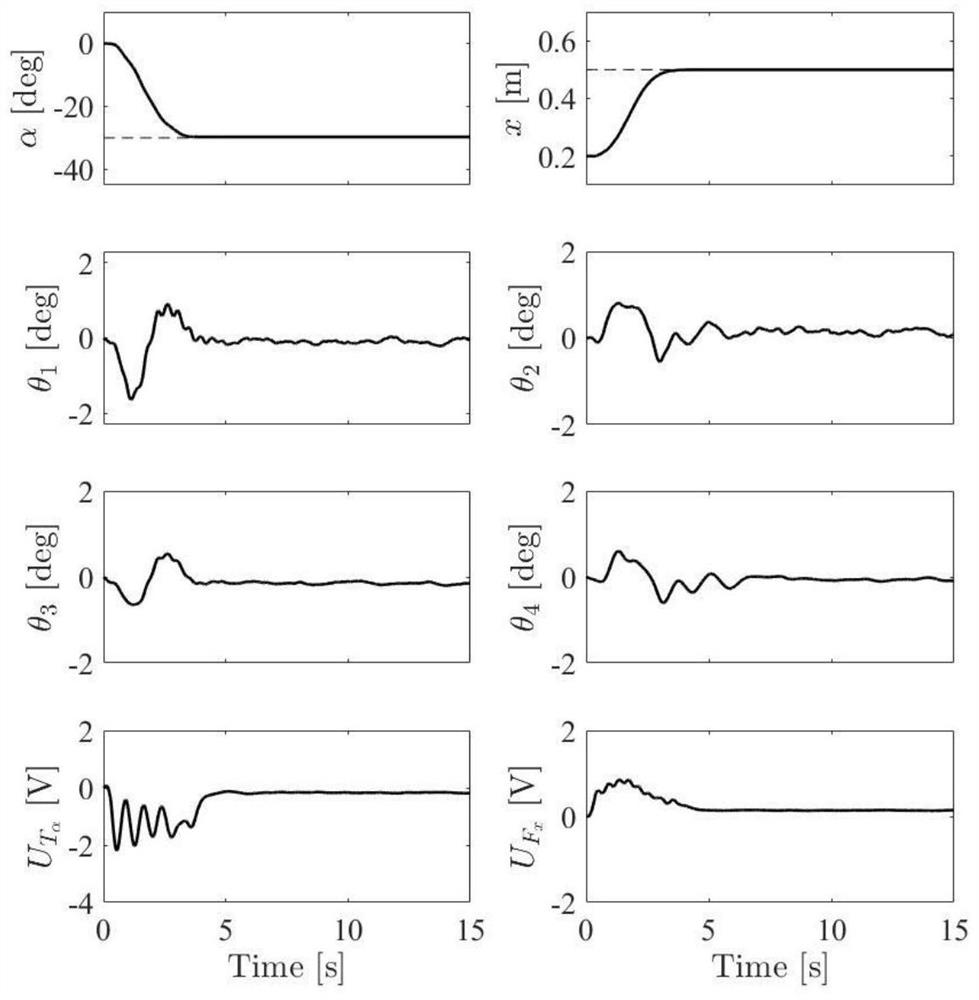
[0102] refer to Figure 3-5 , which is the second embodiment of the present invention. This embodiment is different from the first embodiment. In order to better verify the technical effect adopted in the method of the present invention, the traditional controller LQR is selected in this embodiment to carry out Test, compare the test results with the means of scientific demonstration, to verify the real effect of this method.
[0103] refer to Figure 5 , in order to conduct experiments, this embodiment builds an experimental platform, which is composed of PC, control board, servo motor driver, trolley, cantilever, and swing angle measurement mechanism. Generate the code of the control board (Googol-tech motion control board (GT-400-SV-PCI)) with a sampling period of 0.005s, and then monitor and record the experimental data on the control board in real time through serial communication, which can drive the position of the part The signal comes from the counting of the encode...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More