

Unmanned aerial vehicle control system based on portable electro-oculogram acquisition device
A technology of a collection device and a control system, applied in the field of flight control, can solve the problems of discomfort, low portability, and complicated control methods, and achieve the effects of efficient control, improved flexibility and diversity, and broad application prospects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
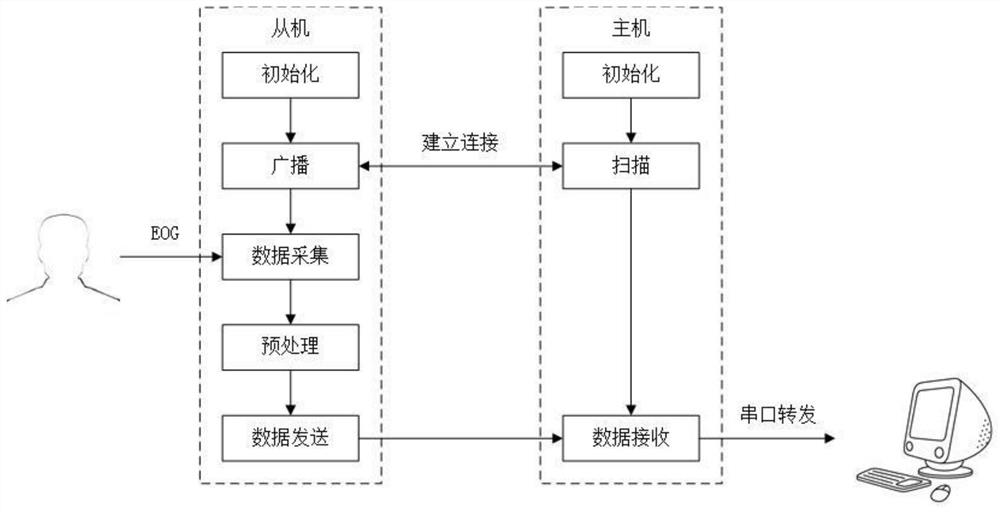
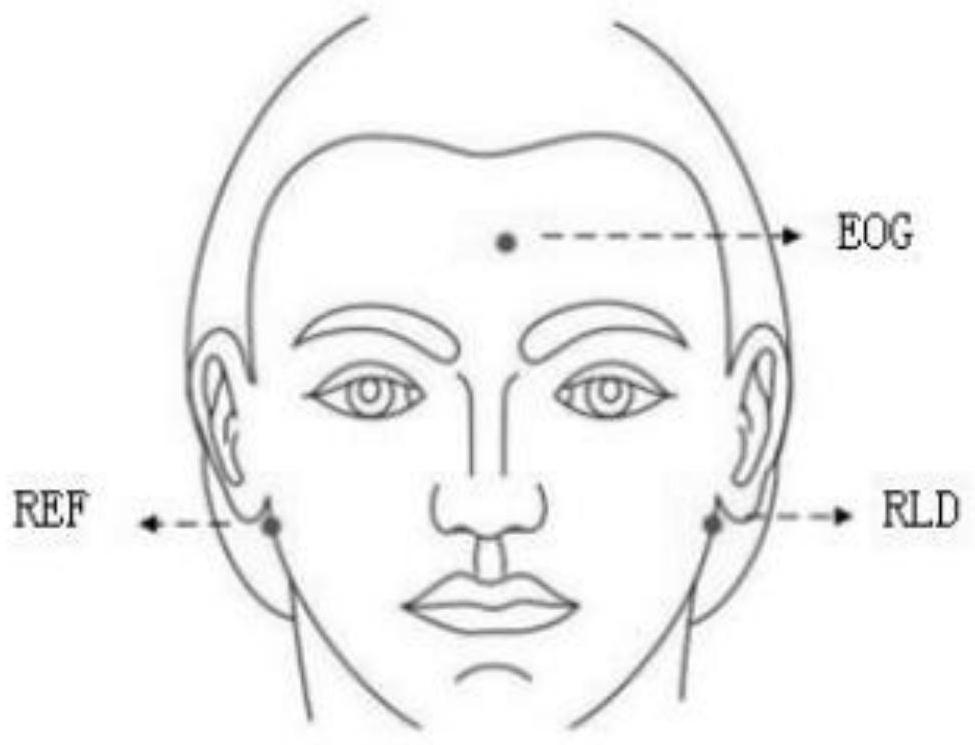
[0024] see Figure 1 to Figure 3 , the present invention provides a technical solution: an unmanned aerial vehicle control system based on a portable oculoelectric collection device. It consists of two parts, and wireless communication is used for information transmission between the two. Commonly used short-distance wireless communication protocols include Wi-Fi, Bluetooth, ZigBee, and NFC. Here, Bluetooth communication is used as an example; the master-slave establishes a connection and data The communication process is as figure 1 As shown; the master-slave processing chip takes the model CC2640 as an example. Both need to initialize the process after power-on, including clock initialization, on-board peripheral initialization, and Bluetooth GAP layer and GATT layer initialization. Then the slave machine enters the broadcast state, and sends broadcast packets in the three broadcast channels of the 2.4GHz frequency band, including the device name, UUID, and device address o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More