Bionic Locomotion Method for Bionic Ray Robot Based on Multiple Pairs of Parallel Pectoral Fins of MPF
A robot and pectoral fin technology, which is applied in transportation and packaging, underwater operation equipment, ships, etc., can solve the problems of limiting the dexterity of bionic rays, the inability to achieve independent movement, and the strong correlation of pectoral fin movement, etc., to achieve a clear movement principle , exercise to achieve the effect of convenience and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
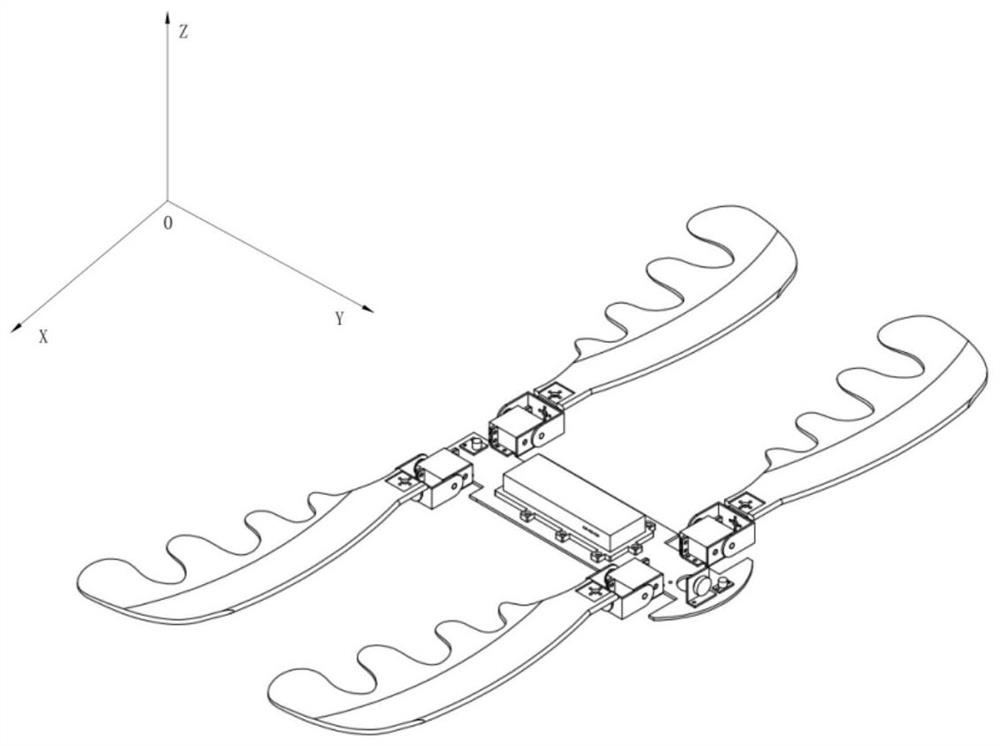
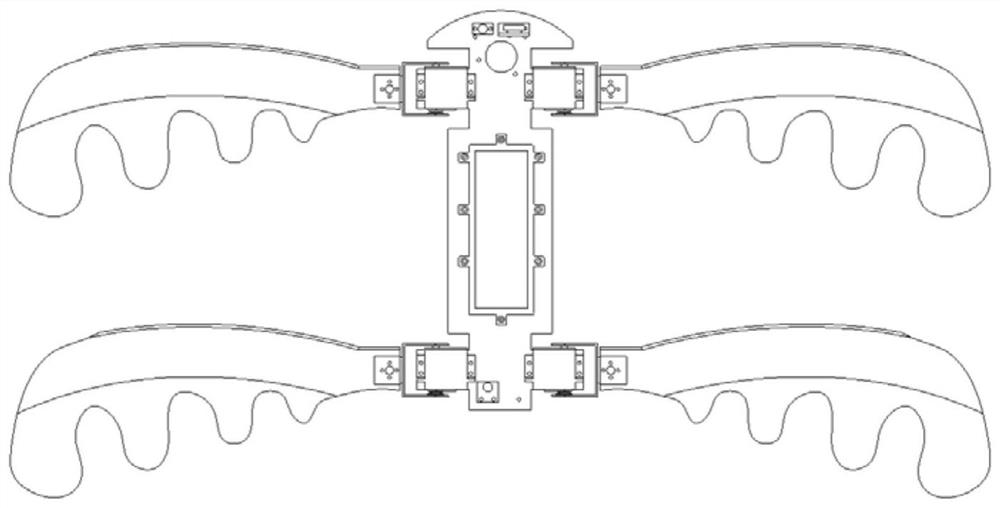
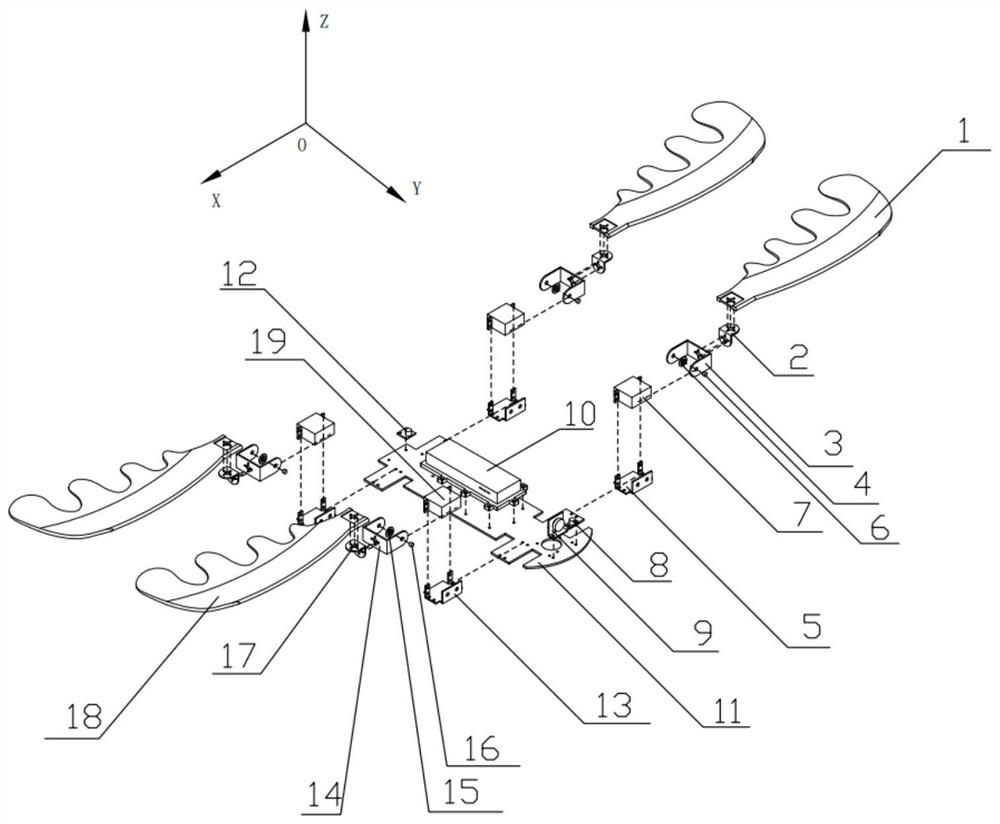
[0053] combine Figure 1-7 , the present embodiment is a bionic motion method based on MPF multiple pairs of parallel pectoral fin bionic skate robots, including a left pectoral fin leaf 1; a first L-shaped bracket 2; a first U-shaped bracket 3; a first bearing 4; a first rudder machine bracket 5; first flange plate 6; first underwater steering gear 7; gyroscope 8; camera 9; control component box 10; U-shaped support 14; second flange 15; second bearing 16; second L-shaped support 17; right pectoral fin leaf 18; second underwater steering gear 19; left front pectoral fin L1; left rear pectoral fin L2; right front pectoral fin R1; Right rear pectoral fin R2; main body.
[0054] combine figure 2 , 3 and Figure 4 , This embodiment is a bionic locomotion method based on multiple pairs of parallel pectoral fin bionic skate robots based on MP...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com