

Method for rapidly and accurately collecting low-altitude remote sensing images based on unmanned aerial vehicle technology
A low-altitude remote sensing and unmanned aerial vehicle technology, which is applied in the direction of non-electric variable control, instruments, control/regulation systems, etc., can solve the problems of lack of satellite remote sensing images, driver fatigue, and large errors in positioning and measuring areas of satellite remote sensing images.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0106] A piece of geomorphic data with an orthographic area of about 9 mu was collected in a mountainous area. In remote mountainous areas, AutoNavi, Baidu, Tencent, Tiantu, etc. do not have high-resolution satellite remote sensing images and vector map data in the area. Collect data according to the following procedure.
[0107] 1. Turn on the drone and the remote controller of the drone.
[0108] 2. Fly the UAV at a certain height, so that the pre-acquisition area is in the interface of the UAV's gimbal camera, which is assumed to be 50m here.
[0109] 3. Click Generate Route, the software will automatically generate the route, the specific calculation is as follows:
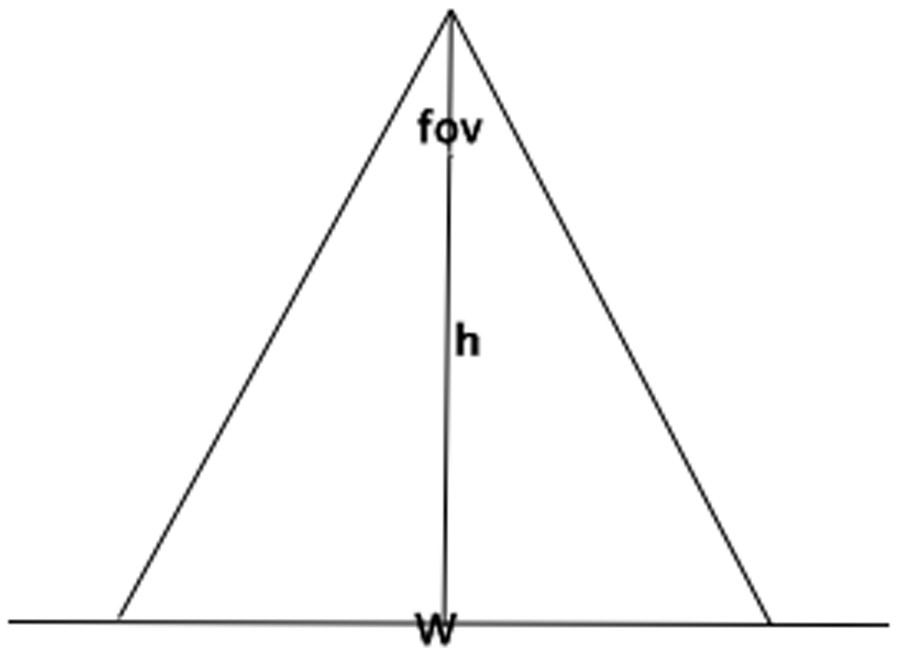
[0110] (1) First calculate the size of the actual area imaged by the UAV at a height of 50m,
[0111] Width W = 2*tan(84 / 2)*50 ≈90.04,
[0112] Image height H = 3*W / 4=67.53,
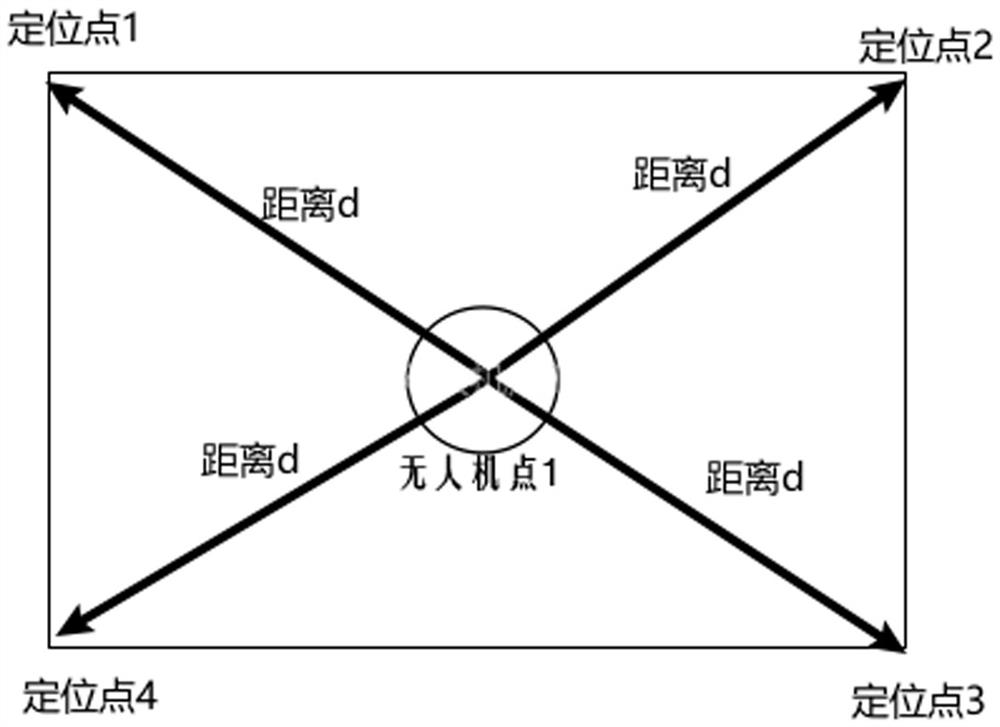
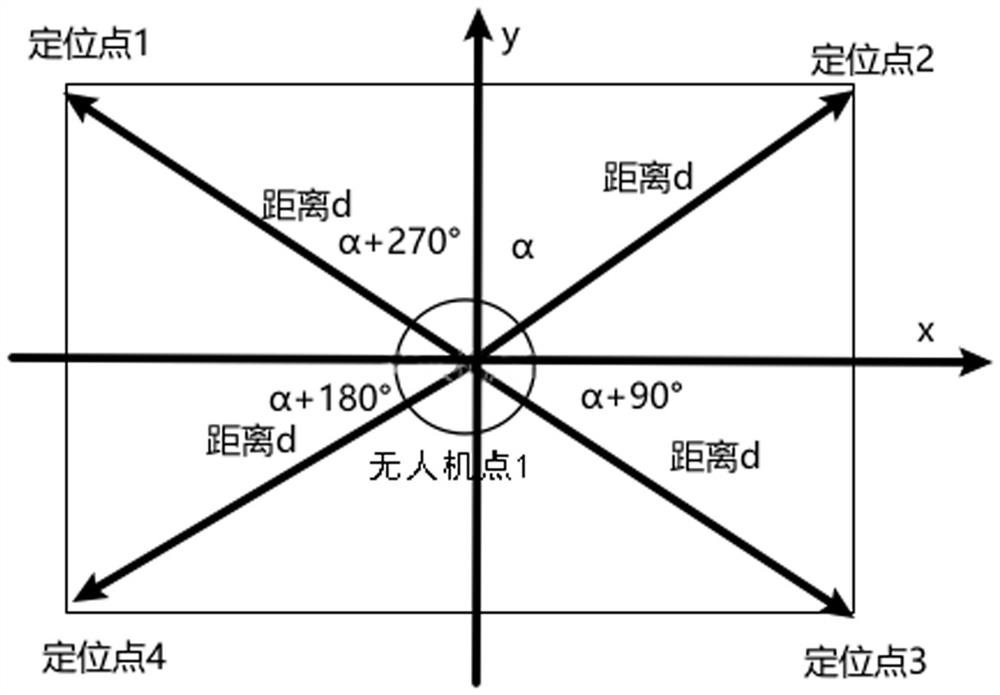
[0113] Distance from four anchor points ≈112.55,
[0114] phase angle =23.57°;
[0115] (2) Then calculate the latitude a...
Embodiment 2
[0135] Collect data of an agricultural water conservancy project with an orthographic area of about 36 mu in a mountainous area. In remote mountainous areas, AutoNavi, Baidu, Tencent, Tiantu, etc. do not have high-resolution satellite remote sensing images and vector map data in the area. Collect data according to the following procedure.
[0136] 1. Turn on the drone and the remote controller of the drone.
[0137] 2. Fly the UAV at a certain height, so that the pre-acquisition area is in the interface of the UAV's gimbal camera, which is assumed to be 100m here.
[0138] 3. Click Generate Route, the software will automatically generate the route, the specific calculation is as follows:
[0139] (1) First calculate the size of the actual area imaged by the UAV at a height of 100m,
[0140] Width W = 2*tan(84 / 2)*100 ≈180.08,
[0141] Image height H = 3*W / 4=135.06,
[0142] Distance from four anchor points ≈225.1,
[0143] phase angle =23.57°,
[0144] (2) Then cal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More