

Composite robot man-machine interaction grinding control system and method based on teleoperation
A technology of human-computer interaction and control system, applied in the field of robotics, can solve problems such as poor adaptability, high requirements for grinding shape, and poor grinding quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings.
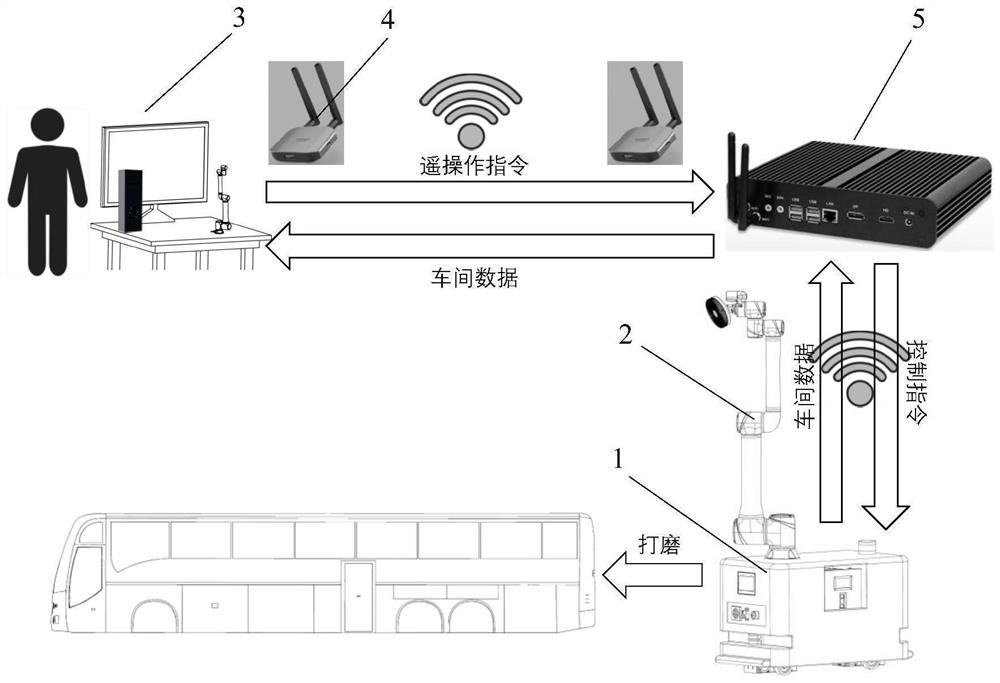
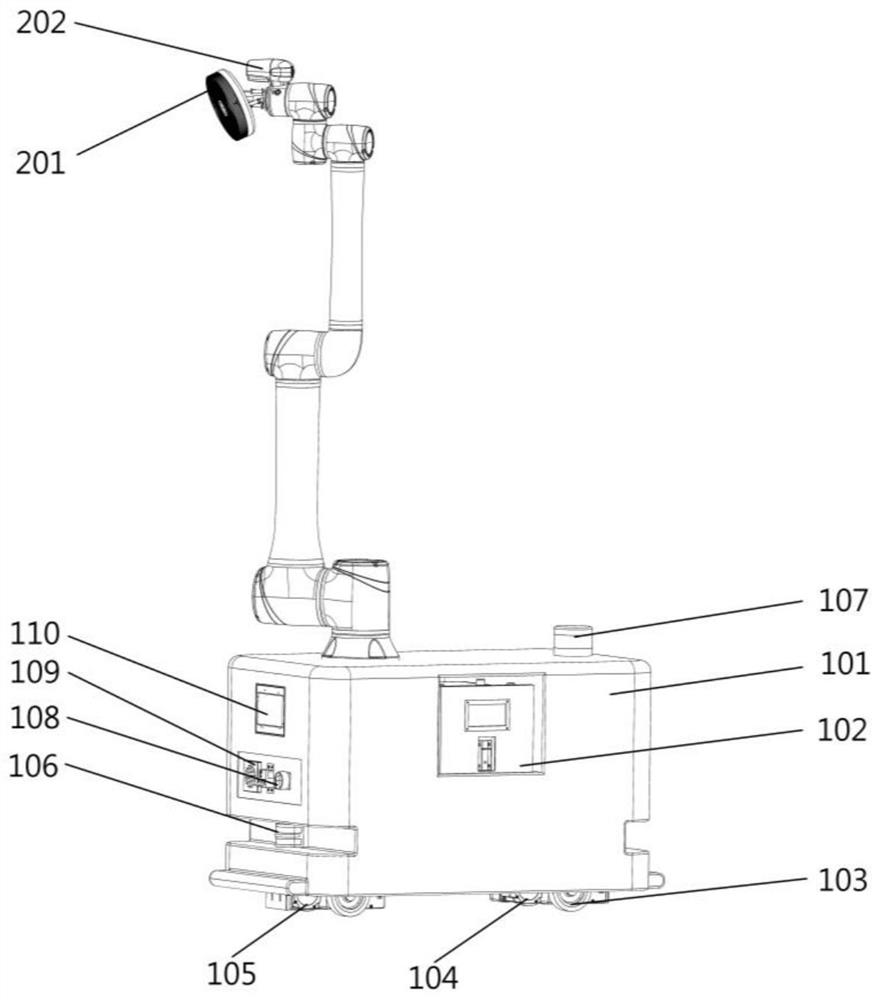
[0037] Such as figure 1As shown, the human-computer interactive grinding control system based on remote operation of the compound robot in this embodiment includes a mobile robot platform 1 based on four-wheel differential, a six-axis mechanical arm 2 equipped with an active and compliant grinding device, and a Human-computer interaction equipment 3, a control platform 4 for terminal control, and a wireless transmission device 5 for control signal and image data transmission. The mobile robot platform 1 based on the four-wheel differential is the mobile carrier of the entire equipment and is placed on the ground. The six-axis mechanical arm 2 loaded with the active and smooth grinding device moves through the flange and the four-wheel differential. The robot platform 1 is connected, and the two constitute the main body of the composite grinding robot. The staff in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More