

Artificial intelligence robot based on garbage classification and recognition system
A recognition system and garbage classification technology, applied in character and pattern recognition, instruments, manipulators, etc., can solve the problems of inability to grasp garbage, fixed working position, etc., to improve grasping firmness, increase friction, and improve practicability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0040] An artificial intelligence robot based on a garbage classification and recognition system, such as Figure 1-6As shown, it includes a garbage classification identification system, and the garbage classification identification system includes a control module, a drive module, an image acquisition and processing module, a signal receiving module, a display module, a voice broadcast module and a garbage collection module; the control module is connected with the driver module respectively , the signal connection between the image acquisition and processing module, the signal receiving module, the display module, the voice broadcast module and the garbage collection module; the control module receives the instructions sent by the signal receiving module, and receives the information sent by the image acquisition and processing module; The processing module, display module, voice broadcast module and garbage collection module receive instructions sent by the control module. ...
Embodiment 2
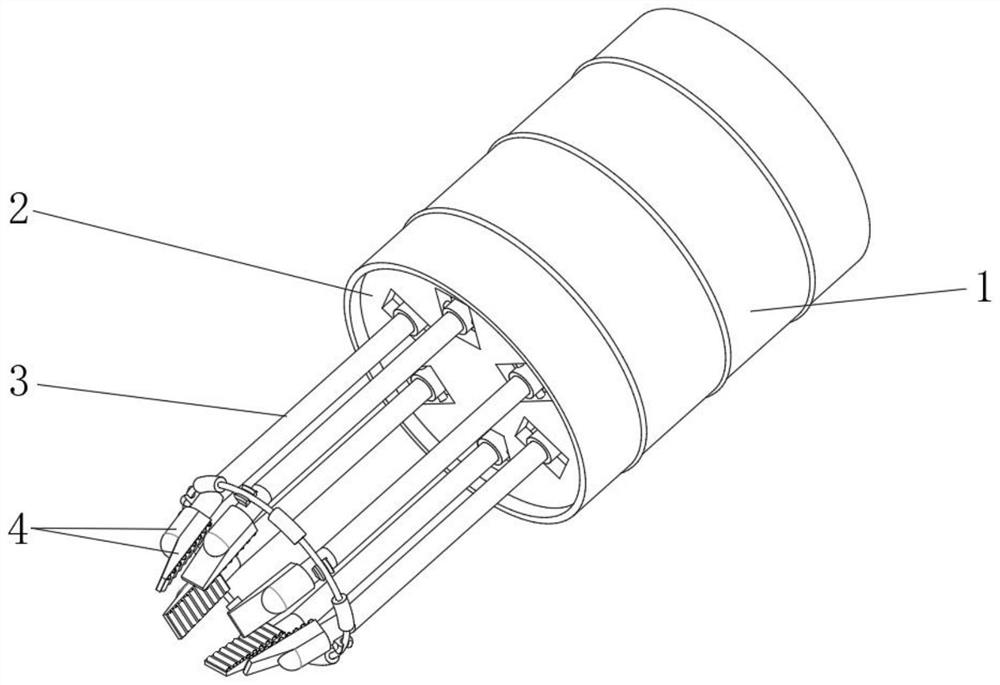
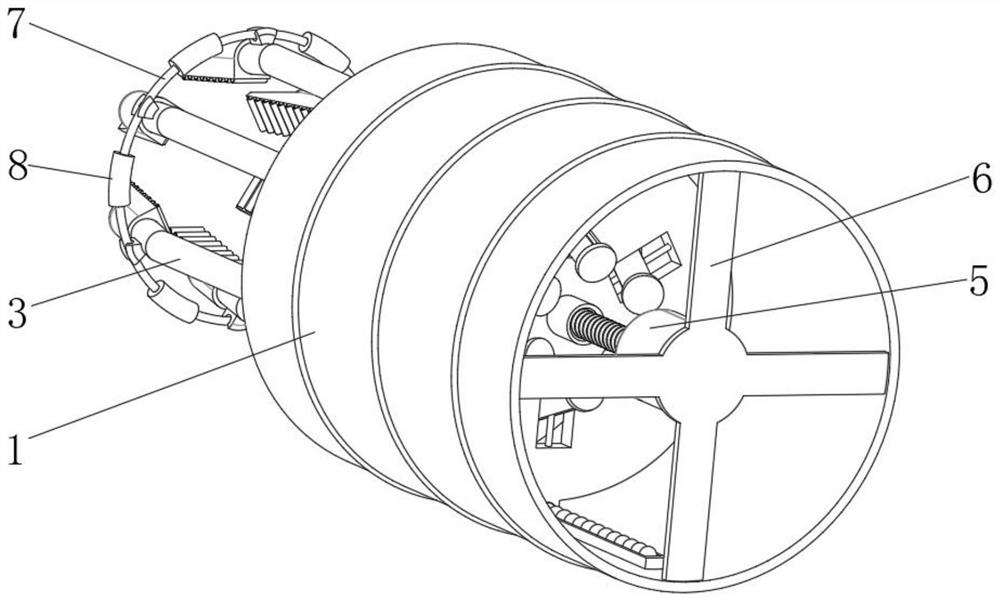
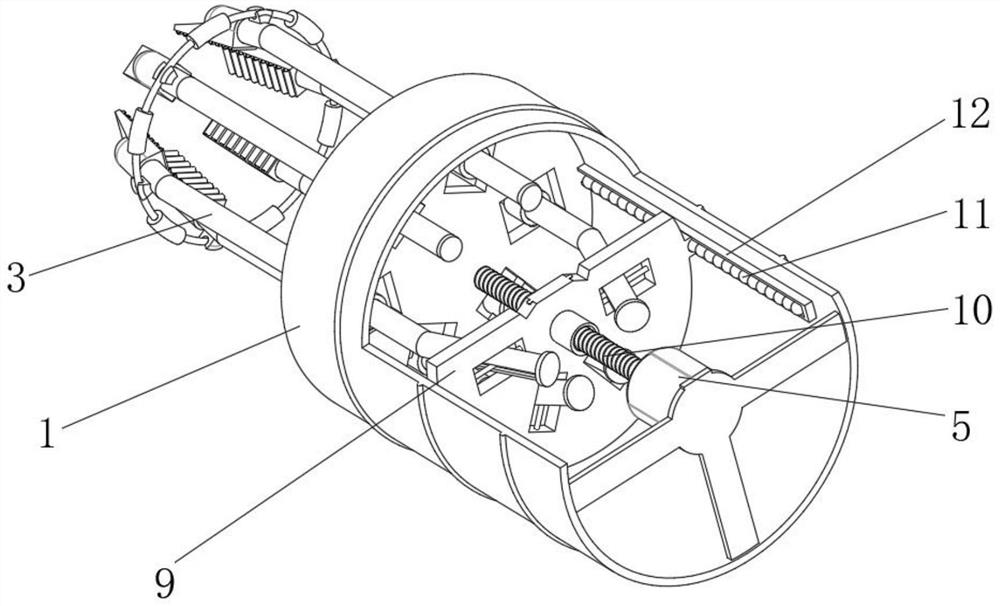
[0051] An artificial intelligence robot based on a garbage classification and recognition system, such as Figure 1-6 As shown, in order to facilitate the collection of garbage; this embodiment is further described on the basis of Embodiment 1: the garbage collection module realizes garbage collection based on the manipulator assembly; the manipulator assembly includes an arm main body 1, a fixed plate 2 and a movable plate 9 , the fixed plate 2 is fixed on the inner wall of one end of the arm main body 1 by screws, and the inner wall of the arm main body 1 is equipped with a motor 5 through a mounting bracket 6, and the output end of the motor 5 is connected to a threaded post 10 in rotation, and the threaded post 10 Connected to the inner wall of the movable plate 9 by threads, the inner wall of the fixed plate 2 is rotatably installed with a rotating sleeve 15 through the mounting shaft 18, and the rotating sleeve 15 is fixed with grab bars 3 by screws, and each grab bar 3 i...
Embodiment 3
[0056] An artificial intelligence robot based on a garbage classification and recognition system, such as Figure 1-6 As shown, in order to prevent garbage from falling off between the jaw heads 4; this embodiment makes the following improvements on the basis of embodiment 2: one side of the outer wall of the grab bar 3 is integrally provided with a buckle 20, and the inside of the buckle 20 The same elastic cord 7 is clamped; by setting the elastic cord 7, the garbage grasped by the jaw head 4 can be limited to prevent it from falling off from the gap between the grab bars 3, which improves the practicability.
[0057] In order to improve the grasping effect on magnetic metal garbage, such as Figure 6 As shown, the outer wall of the elastic rope 7 is sleeved with arc magnets 8; the arc magnets 8 and the grab bars 3 are arranged in a staggered distribution; Adsorption fixation improves grip firmness.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More