Joint module inequality constraint optimal robust control method based on reinforcement learning
A reinforcement learning and robust control technology, applied in neural learning methods, adaptive control, biological models, etc., can solve the problem of insufficient accuracy, inability to control joint modules within a specified range, and joint modules running off track and other problems to achieve the effect of improving the control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
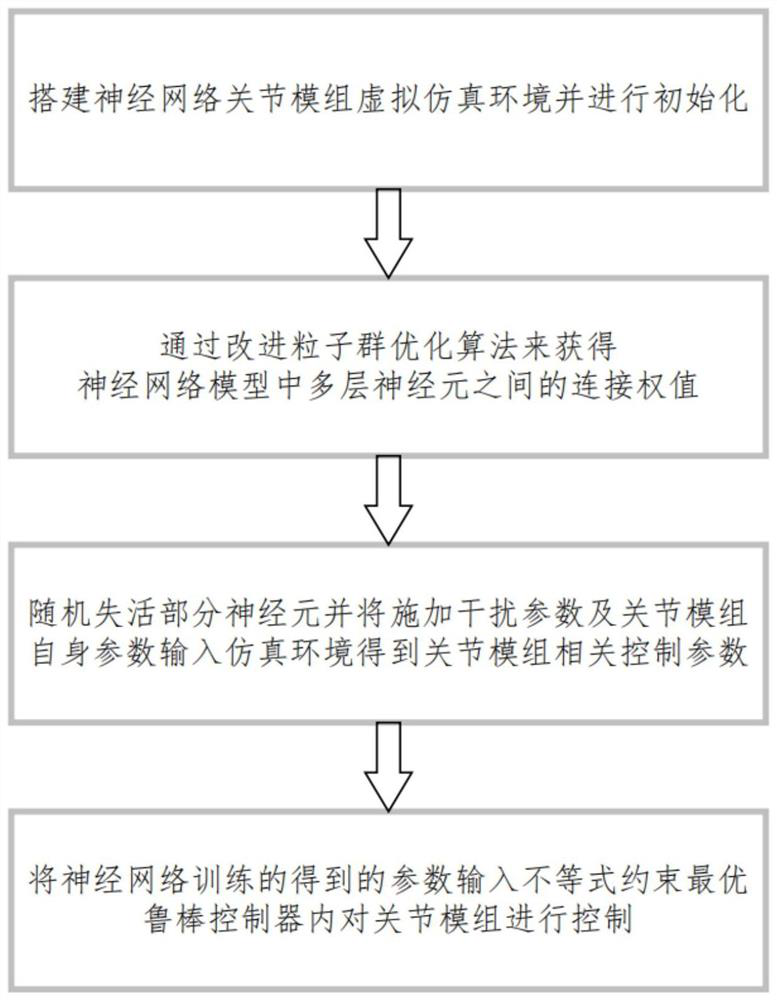
[0068] Such as figure 1 As shown, an optimal robust control method based on reinforcement learning for joint module inequality constraints, the method includes the following sequential steps:
[0069] (1) First build a joint module virtual simulation environment with neural network training capabilities on the simulation platform, and build a reinforcement learning neural network model with the Dropout random inactivation neuron method;
[0070] (2) Initialize the joint module virtual simulation environment;
[0071] (3) The improved particle swarm optimization algorithm is used to adjust the connection weights between multi-layer neurons in the reinforcement learning neural network model, so as to realize the adaptive learning of the reinforcement learning neural network oriented to the trajectory tracking control of the joint module;
[0072] (4) Randomly deactivate a part of the neurons of the reinforcement learning neural network model, input the preset interference param...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



