

Pneumatic soft mechanical arm
A software machine and software technology, applied in the field of robotic arms, can solve the problems of low arm strength, limited ability to manipulate objects, and inability to adjust the posture of fingers, and achieve the effect of simple preparation and control methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the technical solutions of the present invention clearer and clearer to those skilled in the art, the present invention will be further described in detail below in conjunction with the examples and accompanying drawings, but the embodiments of the present invention are not limited thereto.
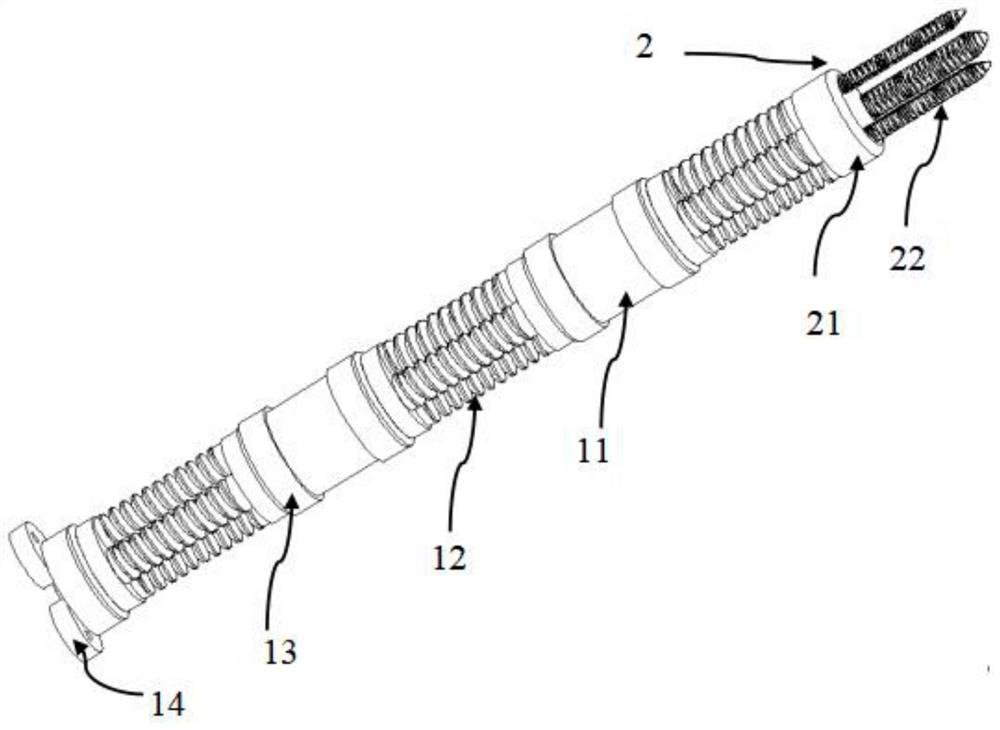
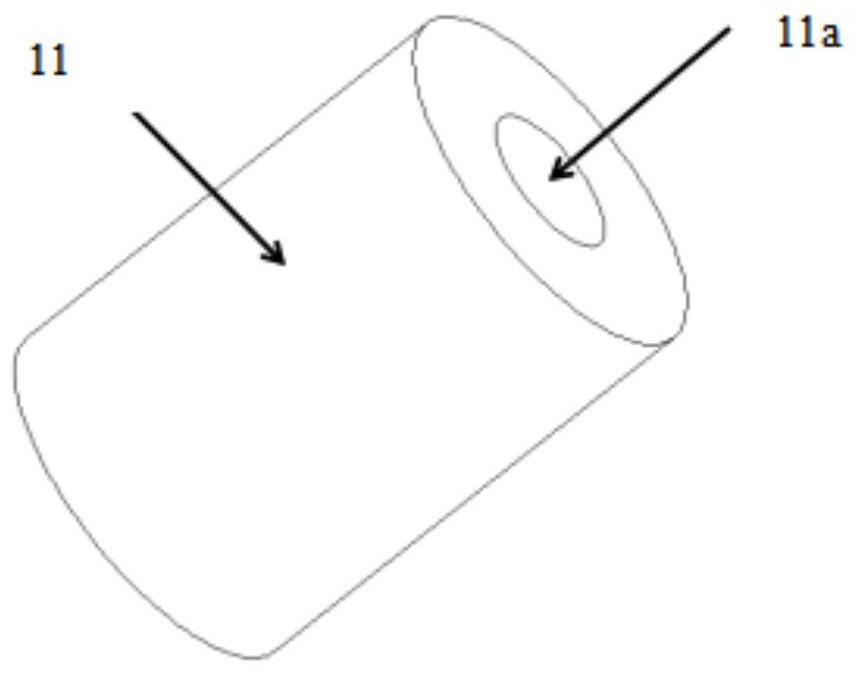
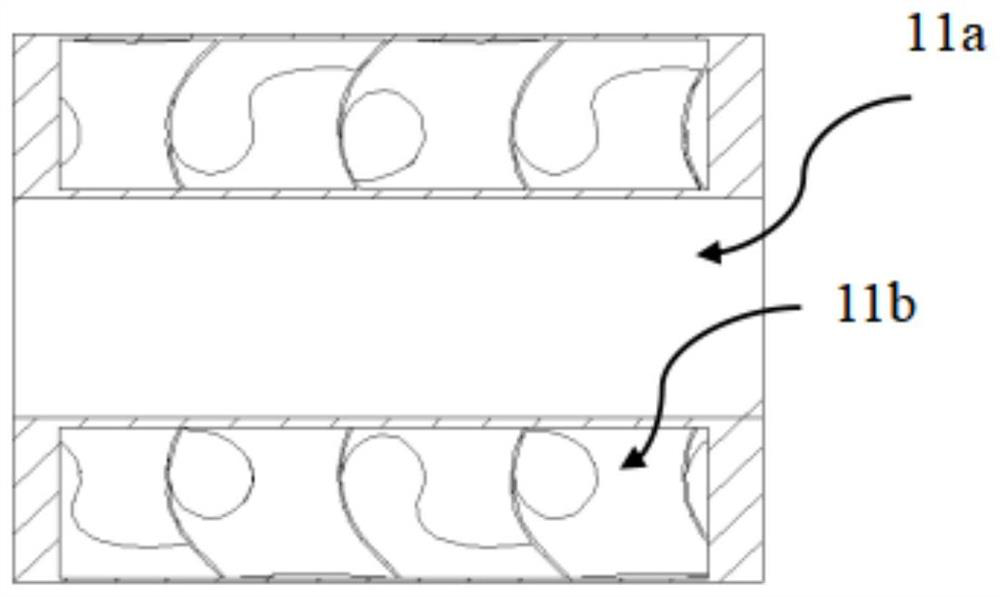
[0047] like Figure 1-Figure 7As shown, a pneumatic soft manipulator provided in this embodiment includes at least two sets of rigid body connecting parts 11, and drive rod connecting seats 13 are sleeved on the outer sides of both ends of the rigid body connecting parts 11. The outer side is provided with four sets of driving rod bodies 12 near the ring portion of the driving rod connecting seat 13, and the end of the tail end driving rod body 12 that is not fixed on the driving rod connecting seat 13 is equipped with an arm holder 14, which is not fixed on the driving rod connecting seat 13. The end of the head end drive rod body 12 on the seat 13 is equipped wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More